

Forside > Produkter > Integrerede stepservo motorer > RS485 Integrerede stepservo motorer

Vores JSS57R er en integreret hybrid servomotor baseret på RS485 bus, der understøtter Modbus RTU protokol. Dette produkt integrerer hybridservomotoren og driveren og bruger standardmodus RTU-buskommunikationsprotokollen til styring. Sammenlignet med den traditionelle kombination af trinmotor og trinmotor er omkostningseffektiviteten højere. Dette integrerede hybridservoprodukt integrerer fordelene ved buskommunikationskontrol, enkel ledning, ingen tabte trin, lav temperaturstigning, lav støj, høj hastighed, højt drejningsmoment og lav pris. Det er et meget omkostningseffektivt produkt til styring af bevægelse.
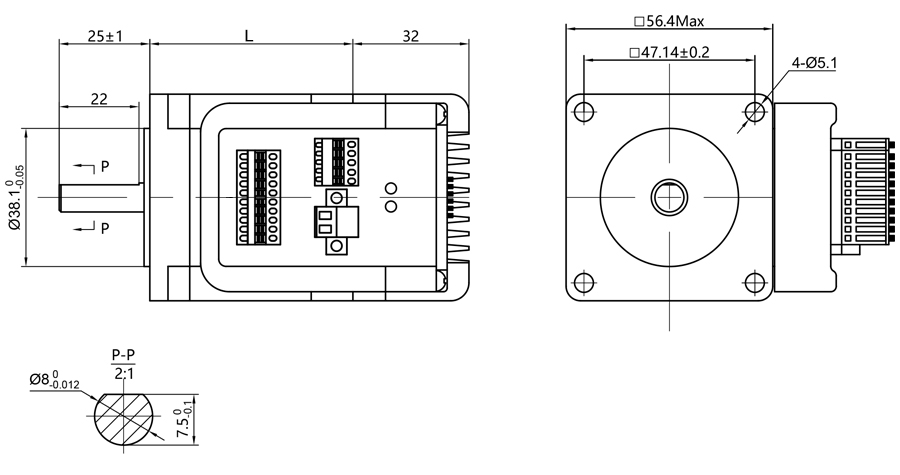
1.Figurerne
2.Elektriske specifikationer
Model nr. |
Trækvinkel |
Motorlængde |
Strøm /Phase |
Modstand /Phase |
Induktans /Phase |
Holdetoment |
(°) |
(L) mm |
A. |
ω |
mH |
N.M |
|
JSS57R1.5N |
1.8 |
56 |
4.2 |
0.4
|
1.2 |
1.2 |
JSS57R2N |
1.8 |
76 |
4.2 |
0.5 |
1.8 |
2 |
JSS57R3N |
1.8 |
112 |
4 |
0.9 |
4.0 |
3 |
3.Elektriske indikatorer
Strømforsyning |
DC24~48V, anbefalet strømforsyning DC36V |
Udgangstrækning |
Spids 6,0 A (strøm varierer med belastningen) |
Logisk indgangsstrøm |
7~16mA, 10mA anbefales |
Kommunikationsformål |
RS485 |
maksimal kommunikationsfrekvens |
115200 bps |
Strømforsyning |
DC24~48V, anbefalet strømforsyning DC36V |
5.Anvendelsesmiljø og parametre
Kølemetode |
Naturlig køling eller ekstern radiator |
|
Brugsmiljø |
Brug lejlighederne |
Undgå støv, olie og ætsende gasser så meget som muligt |
Temperatur |
0~40°C |
|
Fugtighed |
40 ~ 90% RH |
|
Vibration |
5,9 m/s2Max |
|
Lagrings temperatur |
-20°C~80°C |
|
6.Interfacedefinition
(1)Tilgangsport til strøm
Terminalnummer |
Symbol |
Navn |
Illustrer |
1 |
+Vdc |
Positivt terminalsystem til jævnstrømsforsyning |
DC+24V~48V Anbefalet DC+36V-strømforsyning |
2 |
GND |
Tændkraft til jord |
(2) Kontrolsignalport
Terminalnummer |
Symbol |
Navn |
Illustrer |
1 |
CCW+ |
Positiv grænse |
Støtte +5V~+24V |
2 |
CCW- |
Positiv grænse negativ |
|
3 |
HOME+ |
Den mekaniske oprindelse er positiv |
|
4 |
Hjem- |
Negativ mekanisk oprindelse |
|
5 |
CW+ |
Negativ grænse positiv |
|
6 |
CW- |
Negativ grænse - negativ |
|
7 |
PEND+ |
Positiv udgang i position |
|
8 |
- Det er ikke... |
Udsendelse af negativt signal i position |
|
9 |
ALM+ |
Alarmsignal udgives. |
|
10 |
- Jeg er ikke... |
Udsendelse af alarmsignal negativt |
(3) RS485-kommunikationsport
Terminalnummer |
Symbol |
Navn |
1 |
RS485+ |
RS485-kommunikationsgrænseflade |
2 |
RS485- |
|
3 |
RS485+ |
|
4 |
RS485- |
|
5 |
GND |
|
(4)Statusangivelse
PWR: Strømindikator. Når den er tændt, er det grønne indikatorlys altid tændt.
ALM: Fejlindikator. Rødt lys blinker én gang inden for 3 sekunder: overstrøm eller fase-til-fase kortslutningsfejl; Det røde lys blinker 2 gange kontinuerligt inden for 3 sekunder: Over-spændingsfejl;
Det røde lys blinker 7 gange kontinuerligt inden for 3 sekunder: positionsfejl er uden for tolerancen alarm.
7.DIP-kontaktstilling
JSS57R bruger en 6-bit DIP-switch til at indstille drevstationsnummeret og kommunikationsbaudhastigheden.
SW1~SW4: Indstilling af stationsnummeret. SW5~SW6: Køretøjskommunikations baudfrekvens. Efter at slavestationens nummer og kommunikationsboudfrekvens er ændret, skal den tændes igen for at få virkning.
Slave nummer |
SW1 |
SW2 |
SW3 |
SW4 |
standard |
På |
På |
På |
På |
1 |
Afbrydet |
På |
På |
På |
2 |
På |
Afbrydet |
På |
På |
3 |
Afbrydet |
Afbrydet |
På |
På |
4 |
På |
På |
Afbrydet |
På |
5 |
Afbrydet |
På |
Afbrydet |
På |
6 |
På |
Afbrydet |
Afbrydet |
På |
7 |
Afbrydet |
Afbrydet |
Afbrydet |
På |
8 |
På |
På |
På |
Afbrydet |
9 |
Afbrydet |
På |
På |
Afbrydet |
10 |
På |
Afbrydet |
På |
Afbrydet |
11 |
Afbrydet |
Afbrydet |
På |
Afbrydet |
12 |
På |
På |
Afbrydet |
Afbrydet |
13 |
Afbrydet |
På |
Afbrydet |
Afbrydet |
14 |
På |
Afbrydet |
Afbrydet |
Afbrydet |
15 |
Afbrydet |
Afbrydet |
Afbrydet |
Afbrydet |
Bemærk: Slave station nummer indstilling, når det er i standard filen kan definere slave station nummer ved at indstille den brugerdefinerede drive slave station nummer register (0x0020), området er 1 ~ 31.
Kommunikationsbaudfrekvens |
SW5 |
SW6 |
9600 |
På |
På |
19200 |
Afbrydet |
På |
38400 |
På |
Afbrydet |
115200 |
Afbrydet |
Afbrydet |
Bemærk: Når kommunikationsbaudfrekvensen er sat til 9600bps, er serienformatet fastgjort til 8 databits, ingen paritet og 1 stopbit. Når der er fastsat til tre andre baudfrekvenser, bestemmes serienportdataformatet af serienportdataformatregistret (0x0021).
(8)Almindelige dimensioner
Copyright © Changzhou Jinsanshi Mechatronics Co., Ltd. All rights reserved. - Fortrolighedspolitik



