

Startseite > Produkte > Schrittmaschinen mit geschlossener Schleife > Schaltkreislauf-Schrittfahrzeug

Unser HSS86 ist ein 2-phasiger Schrittmotortreiber mit geschlossenem Regelkreis der Nema 34-Serie. Er verwendet 32-Bit-DSP und Vektorsteuerungstechnologie, die verhindert, dass der Schrittmotor Schritte verliert, und die Genauigkeit des Motors gewährleistet. Die Drehmomentreduzierung ist bei höheren Geschwindigkeiten viel geringer als bei einem Schrittmotor mit offenem Regelkreis. Das geschlossene Regelkreissystem ist eine ideale Verbesserung und ein guter Ersatz für ein offenes Regelkreissystem. Darüber hinaus verfügt es auch über einige Funktionen von AC-Servomotoren, kostet aber nur die Hälfte eines AC-Servos. Unser Schrittmotortreiber mit geschlossenem Regelkreis HSS86 kann in kleinen automatischen Geräten und Instrumenten wie Graviermaschinen, speziellen Industrienähmaschinen, Abisoliermaschinen, Markierungsmaschinen, Dosiermaschinen, Schneidemaschinen, Laser-Fotosatzmaschinen, Graphikplottern, CNC-Maschinen, automatischen Montagegeräten usw. eingesetzt werden.
1.Eigenschaften
● Schrittmotor geschlossener Kreislauf, nie Schritt verlieren.
● Verbessert das Drehmoment und die Arbeitsgeschwindigkeit des Motors.
● Automatische Stromregelung je nach Last, niedrigerem Temperaturanstieg.
● Für alle mechanischen Belastungsbedingungen geeignet (einschließlich der Schrägkorbspulle und des Rades mit geringer Steifigkeit), keine Anpassung des Gewichtes.
● Motorarbeit reibungslos und geringe Vibrationen, hohe dynamische Leistung bei Beschleunigung und Verzögerung.
● Keine Vibrationen von hoher Geschwindigkeit bis zu Nullgeschwindigkeit.
● Antrieb der NEMA 34 Serie mit 4,5 Nm, 8 Nm, 12 Nm, geschlossener Regelkreis Schrittmotor.
● Die Reaktionsfrequenz der Impulse kann 200 KHz erreichen.
● 16 verschiedene Mikroschritte, höchstens 51200 Mikroschritte/Rv.
● Spannungsbereich: AC24~80V oder DC30V~110V.
● Funktion zum Schutz vor Überstrom, Überspannung und Positionsdifferenz.
2.Elektrische Parameter
Spannungsbereich |
AC20~80V oder DC30~110V |
Spitzenstrom |
Spitze 8,0 A (Stromänderung je nach Belastung) |
Logische Eingabe |
7 bis 20 mA |
Frequenz |
0~200KHz |
Passender Schrittmotor |
2-Phasen NEMA 34 Hybrid Closed Loop Schrittmotor |
Verschlüsselungsleitungen |
1000 |
Isolationswiderstand |
≥ 500 MΩ |
3.Umgebungsparameter
Kühlmethode |
Natur oder Heizkörper |
|
|
Betrieb uMWELT |
Betriebsanlässe |
vermeiden Sie Staub, Öl, Korrosionsgas |
Betriebstemperatur |
0~50℃ |
|
Betriebsfeuchtigkeit |
40 bis 90% RH |
|
Vibration |
5,9 m/s2 Max |
|
Lagertemperatur |
-20℃~65℃ |
|
4.Motor- und Stromversorgungseingangsanschluss
Port-Nr. |
|
|
Motor Kabelfarbe |
1 |
A+ |
Eine Phasenwicklung + |
rot |
2 |
- Ich weiß. |
Eine Phasenwicklung - |
grün |
3 |
B+ |
B-Phasenwicklung + |
gelb |
4 |
- Ich weiß. |
B-Phasenwicklung - |
blau |
5 |
AC1 |
Eingangsspannung |
AC20~80V oder DC30~110V |
6 |
AC2 |
5.Encoder-Eingangsport
Port-Nr. |
|
|
Encoder Kabelfarbe |
1 |
EB+ |
Encoder B Phaseneingang+ |
gelb |
2 |
EB- |
Encoder B Phaseneingang- |
grün |
3 |
EA+ |
Encoder A Phaseneingang+ |
schwarz |
4 |
EA- |
Encoder A Phaseneingang- |
blau |
5 |
VCC |
Encoderspannung (+5 V) |
rot |
6 |
EGND |
Encoder groß (0 V) |
weiß |
(Die fehlverknüpften Encoder-Leiter führen zu Schäden an Treiber oder Encoder.)
6.Signal-Controller-Anschluss
Port-Nr. |
|
|
|
1 |
PUL+ |
Impulseingang + |
Wenn die Signalsteuerungspannung +5 V beträgt, muss der Signalsteuerungseingang keinen zusätzlichen Widerstand anschließen. Wenn die Signalsteuerungspannung +12 V beträgt, muss der Signalsteuerungseingang an einen 1K-Widerstand angeschlossen werden. Wenn die Signalsteuerungspannung +12 V beträgt, muss der Signalsteuerungseingang an einen 2K-Widerstand angeschlossen werden. |
2 |
PUL- |
Impulseingang - |
|
3 |
DIR+ |
Richtungseingabe + |
|
4 |
- Ich weiß. |
Richtungseingabe - |
|
5 |
ENA+ |
Eingang aktivieren + |
|
6 |
- Ich weiß. |
Eingabe aktivieren - |
|
7 |
PEND+ |
Positionssignalausgang+ |
OC-Ausgang, geschlossen, zeigt die Endposition an, offener Schaltkreis zeigt, dass die Position nicht abgeschlossen ist. |
8 |
- Das ist nicht wahr. |
Positionssignalausgang- |
|
9 |
ALM+ |
Alarmsignalausgang+ |
Der Ausgang ist geschlossen, aber kein Alarm. |
10 |
- Ich weiß nicht. |
Alarmsignalausgang- |
7.Schaltereinstellung
SW1: Die Wahl des Schrittmotors. EIN=86HSE8N, 86HSE4N, AUS=86HSE12N
SW2: Drehrichtungseinstellung. EIN=CW, AUS=CCW.
SW3, SW4, SW5, SW6: Mikroschritteinstellung
Mikroschritt/Umdrehung |
SW3 |
SW4 |
SW5 |
SW6 |
Standard (400) |
Auf |
Auf |
Auf |
Auf |
800 |
Aus |
Auf |
Auf |
Auf |
1600 |
Auf |
Aus |
Auf |
Auf |
3200 |
Aus |
Aus |
Auf |
Auf |
6400 |
Auf |
Auf |
Aus |
Auf |
12800 |
Aus |
Auf |
Aus |
Auf |
25600 |
Auf |
Aus |
Aus |
Auf |
51200 |
Aus |
Aus |
Aus |
Auf |
1000 |
Auf |
Auf |
Auf |
Aus |
2000 |
Aus |
Auf |
Auf |
Aus |
4000 |
Auf |
Aus |
Auf |
Aus |
5000 |
Aus |
Aus |
Auf |
Aus |
8000 |
Auf |
Auf |
Aus |
Aus |
10000 |
Aus |
Auf |
Aus |
Aus |
20000 |
Auf |
Aus |
Aus |
Aus |
40000 |
Aus |
Aus |
Aus |
Aus |
Standard: Der Puls kann nach Kundenanforderungen angepasst werden.
8.Statusanzeige
PWR: Stromanzeiglicht: Wenn der Strom an ist, ist das grüne Licht an.
ALM: Alarm-Indikatorlicht: Wenn das rote Licht innerhalb von 3 Sekunden einmal blinkt, bedeutet dies einen Kurzschluss über Strom oder zwischen Phasen; wenn das rote Licht innerhalb von 3 Sekunden zweimal blinkt, bedeutet dies eine Überspannung; wenn das rote Licht innerhalb von 3 Sekunden dreimal blinkt
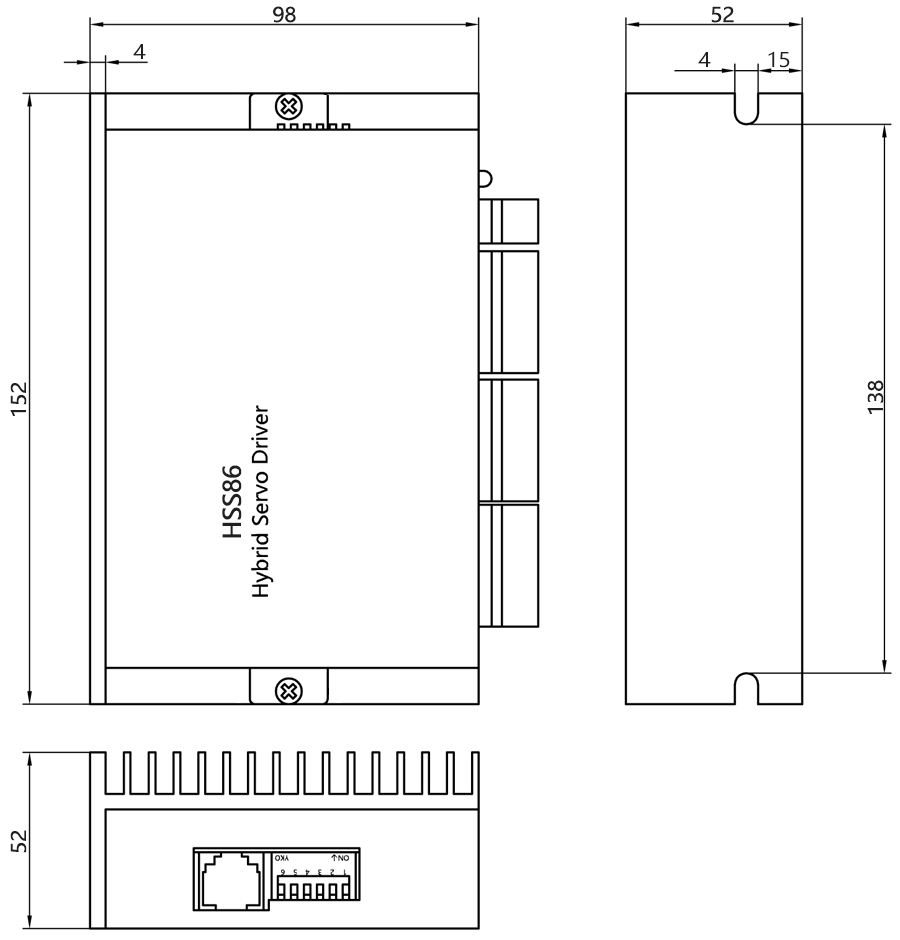
9.Gesamtabmessungen (Einheit = mm)
Copyright © Changzhou Jinsanshi Mechatronics Co., Ltd. All rights reserved. - Datenschutzrichtlinie



