

Startseite > Produkte > Integrierte Schritt-Servomotoren > RS485 integrierte Schritt-Servomotoren

Unser JSS57R ist ein integrierter Hybrid-Servomotor auf Basis eines RS485-Busses, der das Modbus RTU-Protokoll unterstützt. Dieses Produkt integriert den Hybrid-Servomotor und den Treiber und verwendet zur Steuerung das standardmäßige Modbus RTU-Buskommunikationsprotokoll. Im Vergleich zur herkömmlichen Kombination aus Schrittmotortreiber und Schrittmotor ist das Preis-Leistungs-Verhältnis besser. Dieses integrierte Hybrid-Servoprodukt vereint die Vorteile der Buskommunikationssteuerung, einfache Verkabelung, keine verlorenen Schritte, geringen Temperaturanstieg, geringe Geräuschentwicklung, hohe Geschwindigkeit, hohes Drehmoment und niedrige Kosten. Es ist ein sehr kostengünstiges Produkt zur Bewegungssteuerung.
1.Eigenschaften
2.Elektrische Spezifikationen
Modell-Nr. |
Schrittwinkel |
Motorlänge |
Aktuell /Phase |
Widerstand /Phase |
Induktivität /Phase |
Haltedrehmoment |
(°) |
(L) mm |
Ein |
ω |
mH |
N.M |
|
JSS57R1.5N |
1.8 |
56 |
4.2 |
0.4
|
1.2 |
1.2 |
JSS57R2N |
1.8 |
76 |
4.2 |
0.5 |
1.8 |
2 |
JSS57R3N |
1.8 |
112 |
4 |
0.9 |
4.0 |
3 |
3.Elektrische Anzeigen
Stromversorgung |
DC24~48V, empfohlene Stromversorgung DC36V |
Ausgangsstrom |
Spitze 6,0 A (Strom variiert mit der Last) |
Logische Eingabe |
7~16mA, 10mA empfohlen |
Art der Kommunikation |
Die Nummer des Zertifikats ist: |
maximale Kommunikationsrate |
115200 Bps |
Stromversorgung |
DC24~48V, empfohlene Stromversorgung DC36V |
5.Nutzungsumgebung und Parameter
Kühlmethode |
Natürliche Kühlung oder Außengelder |
|
Nutzung Umgebung |
Nutzen Sie Gelegenheiten |
Vermeiden Sie Staub, Öl und ätzende Gase so weit wie möglich |
Temperatur |
0~40°C |
|
Feuchtigkeit |
40 bis 90% RH |
|
Vibration |
5,9 m/s2 Max |
|
Lagertemperatur |
-20°C bis 80°C |
|
6.Schnittstellendefinition
(1)Strom-Eingangsanschluss
Nummer des Terminals |
Symbol |
Name |
Veranschaulichen |
1 |
+Vdc |
Gleichstrom-Positivterminal |
Gleichspannung + 24 V bis 48 V Empfohlene DC+36V-Stromversorgung |
2 |
GND |
Gleichstrom-Erdnetz |
(2) Steuersignalanschluss
Nummer des Terminals |
Symbol |
Name |
Veranschaulichen |
1 |
Gegen den Uhrzeigersinn |
Positive Grenze positiv |
Unterstützt +5 V ~ +24 V |
2 |
CCW- |
Positive Grenze Negativ |
|
3 |
Startseite+ |
Der mechanische Ursprung ist positiv |
|
4 |
HEIM- |
Negativer mechanischer Ursprung |
|
5 |
CW+ |
Negative Grenze positiv |
|
6 |
CW- |
Negative Grenze negativ |
|
7 |
PEND+ |
Positives Ausgangssignal in Position |
|
8 |
PEND-- |
Ausgang des negativen Signals in Position |
|
9 |
ALM+ |
Alarmsignal wird ausgegeben |
|
10 |
- Ich weiß nicht. |
Ausgang des Alarmsignals negativ |
(3)RS485-Kommunikationsanschluss
Nummer des Terminals |
Symbol |
Name |
1 |
RS485+ |
RS485-Kommunikationsschnittstelle |
2 |
RS485- |
|
3 |
RS485+ |
|
4 |
RS485- |
|
5 |
GND |
|
(4)Statusangaben
PWR: Leistungsanzeiger. Wenn sie eingeschaltet ist, ist das grüne Anzeiglicht immer an.
Fehleranzeiger. Rotlicht blinkt einmal innerhalb von 3 Sekunden: Überstrom- oder Phasen-zu-Phasen-Kurzschlussfehler;
Das rote Licht blinkt 7 Mal kontinuierlich innerhalb von 3 Sekunden: der Positionsfehler ist außerhalb der zulässigen Grenzen.
7.DIP-Schaltereinstellung
JSS57R verwendet einen 6-Bit-DIP-Schalter, um die Antriebsstationsnummer und die Kommunikations-Baudrate einzustellen.
SW1~SW4: Einstellung der Antriebsstationsnummer. SW5~SW6: Baudrate der Antriebskommunikation. Nachdem die Slave-Stationsnummer und die Kommunikations-Baudrate geändert wurden, muss die Änderung erneut eingeschaltet werden, damit sie wirksam wird.
Zahl der Sklaven |
SW1 |
SW2 |
SW3 |
SW4 |
standard |
Auf |
Auf |
Auf |
Auf |
1 |
Aus |
Auf |
Auf |
Auf |
2 |
Auf |
Aus |
Auf |
Auf |
3 |
Aus |
Aus |
Auf |
Auf |
4 |
Auf |
Auf |
Aus |
Auf |
5 |
Aus |
Auf |
Aus |
Auf |
6 |
Auf |
Aus |
Aus |
Auf |
7 |
Aus |
Aus |
Aus |
Auf |
8 |
Auf |
Auf |
Auf |
Aus |
9 |
Aus |
Auf |
Auf |
Aus |
10 |
Auf |
Aus |
Auf |
Aus |
11 |
Aus |
Aus |
Auf |
Aus |
12 |
Auf |
Auf |
Aus |
Aus |
13 |
Aus |
Auf |
Aus |
Aus |
14 |
Auf |
Aus |
Aus |
Aus |
15 |
Aus |
Aus |
Aus |
Aus |
Hinweis: Die Einstellung der Slave-Stationsnummer kann, wenn sie sich in der Standarddatei befindet, durch Einstellen des benutzerdefinierten Laufwerks-Slave-Stationsnummernregisters (0x0020) definiert werden, der Bereich liegt zwischen 1 und 31.
Kommunikations-Baudrate |
SW5 |
SW6 |
9600 |
Auf |
Auf |
19200 |
Aus |
Auf |
38400 |
Auf |
Aus |
115200 |
Aus |
Aus |
Hinweis: Wenn die Kommunikationsbaudrate auf 9600 bps eingestellt ist, ist das serielle Datenformat auf 8 Datenbits, keine Parität und 1 Stoppbit festgelegt. Bei der Einstellung auf drei andere Baudraten wird das serielle Datenformat durch das serielle Datenformatregister (0x0021) bestimmt.
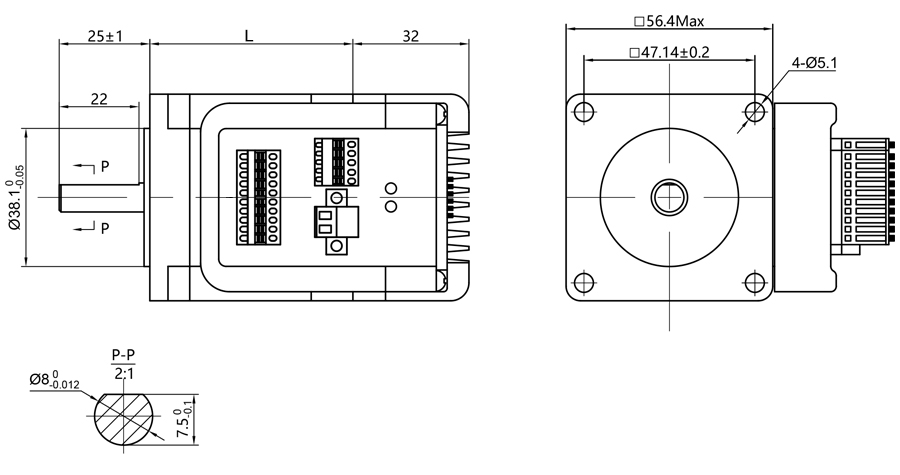
(8) Gesamtabmessungen
Copyright © Changzhou Jinsanshi Mechatronics Co., Ltd. All rights reserved. - Datenschutzrichtlinie



