

Startseite > Produkte > Servosystem > Integrierte Gleichstrom-Servomotoren

Das integrierte Servomotor-Modell JSV57 ist ein brushloser Gleichstrommotor mit einer Rahmengröße von 57 mm, der einen 16-Bit-Encoder und eine Servotreiber integriert. Dieser Gleichstromservomotor verwendet einen 32-Bit-ARM-Chip und optimierte Regelungsalgorithmen, wodurch eine exzellente Konstruktion und kompakte Größe erreicht wird. Das integrierte Design von Treiber und Motor spart nicht nur die Verbindung zwischen Treiber und Motor, sondern reduziert auch effektiv elektromagnetische Störungen bei der Verbindung. Es nutzt bessere Schwingungsunterdrückungs- und Wärmespar-Technologien, was wirksam das Problem von Wärmeentwicklung und Geräuschen löst.
1.Eigenschaften
2.Typische Anwendung
Geeignet für verschiedene Klein- und Mittelautomatisierungssysteme und -instrumente, wie Tintenstrahldrucker, kleine und mittlere Fräsgeräte, elektronische Bearbeitungsanlagen, automatische Greifanlagen, spezielle CNC-Maschinen, Verpackungsanlagen etc. Besonders effektiv in Anlagen, in denen Benutzer niedrige Geräuschemissionen und hohe Geschwindigkeit erwarten.
3.Elektrische Anzeigen
Parameter |
JSV57 |
|||
Min |
Typischer Wert |
Max |
Einheit |
|
Stetiger Ausgangsstrom |
0 |
- |
6 |
Ein |
Eingangsspannung der Spannungsversorgung |
24 |
36 |
48 |
VDC |
Logische Eingabe |
7 |
10 |
16 |
mA |
Logikeingangsspannung |
5 |
5 |
24 |
V |
Pulsfrequenz |
0 |
- |
200 |
kHz |
Isolationswiderstand |
100 |
|
|
MΩ |
4.Elektrische Spezifikation
Einheit |
JSV57-09V36 |
JSV57-14V36 |
JSV57-18V36 |
|
Phasen |
|
3 |
||
Stöcke |
|
8 |
||
Spannung |
|
36VDC |
||
Nennleistung |
W |
90 |
140 |
180 |
Nennmoment |
N.M |
0.28 |
0.45 |
0.57 |
Spitzenmoment |
N.M |
0.8 |
1.1 |
1.5 |
Nennspeed |
u/min |
3000 |
3000 |
3000 |
Nennstrom |
Ein |
3.3 |
5 |
6.6 |
5.Antriebschnittstelle und Kabelierungseinleitung
(1)Strom-Eingangsanschluss
Nummer des Terminals |
Symbol |
Name |
Veranschaulichen |
1 |
+Vdc |
Gleichstrom-Positivterminal |
Gleichspannung + 24 V bis 48 V |
2 |
GND |
Gleichstrom-Erdnetz |
0V |
(2) Steuersignalanschluss
Nummer des Terminals |
Symbol |
Name |
Veranschaulichen |
1 |
PUL + |
Impulseingang + |
Kompatibel mit 5V~24V Signalen |
2 |
PUL - |
Impulseingang - |
|
3 |
DIR + |
Richtungseingabe + |
|
4 |
DIR - |
Richtungseingabe - |
|
5 |
ENA + |
Eingang aktivieren + |
|
6 |
ENA - |
Eingabe aktivieren - |
|
7 |
PED + |
Positionssignalausgang + |
|
8 |
PED - |
Positionssignalausgang - |
|
9 |
ALM + |
Alarmsignalausgang + |
|
10 |
ALM - |
Alarmsignalausgang - |
(3) RS232 Kommunikationsanschluss
Nummer des Terminals |
Symbol |
Name |
Veranschaulichen |
1 |
NC |
|
|
2 |
RX |
RS232-Empfänger |
|
3 |
GND |
Kraftanlegegrund |
|
4 |
TX |
RS232-Sender |
|
5 |
+5V |
Positive Leistungsterminal |
(Dies muss nicht verbunden werden) |
(4)Statusangaben
PWR: Stromindikator. Der grüne Indikator leuchtet, wenn Spannung anliegt.
ALM: Fehlerindikator. Wenn ein Fehler auftritt, blinkt der Indikator in einem 5-Sekunden-Zyklus; wenn der Fehler vom Benutzer beseitigt wurde, ist die rote LED immer aus. Die rote LED blinkt mit einer Frequenz von 2Hz, wobei die LED 200ms an und 300ms aus ist. Die Anzahl der Blinkvorgänge der roten LED in 5 Sekunden steht für unterschiedliche Fehlerinformationen, und die genaue Beziehung wird in der folgenden Tabelle gezeigt:
Seriennummer |
Anzahl der Blinkvorgänge |
Fehlerbeschreibung |
1 |
1 |
Überstrom-Fehler |
2 |
2 |
Positionierungsfehler-Toleranzalarm |
3 |
3 |
Encoder-Fehler |
4 |
4 |
Motorüberlastung |
5 |
5 |
Busspannungsüberschreitung |
6 |
6 |
Busspannungsunterbrechung |
6.Einstellung des DIP-Schalters
7.Eingabebefehlsfilterung
Wenn der DIP-Schalter S1 auf EIN gestellt wird, wird die Filterfunktion aktiviert und die Filterzeit wird durch Register 2603 konfiguriert; diese Funktion ist nur wirksam, wenn der Motor entsperrt ist;
Der JSV57-Treiber verwendet einen sechsstelligen DIP-Schalter, um die Unterteilungspräzision und die Drehrichtung des Motors zu setzen.
(1)Richtungseinstellung
Richtung |
S2 |
Zcw |
Aus |
CW |
Auf |
(2)Mikroschrittaufteilung
Pulse/REV |
S3 |
S4 |
Staffel 5 |
S6 |
Standard |
Auf |
Auf |
Auf |
Auf |
400 |
Auf |
Auf |
Auf |
Auf |
800 |
Aus |
Auf |
Auf |
Auf |
1600 |
Auf |
Aus |
Auf |
Auf |
3200 |
Aus |
Aus |
Auf |
Auf |
6400 |
Auf |
Auf |
Aus |
Auf |
12800 |
Aus |
Auf |
Aus |
Auf |
25600 |
Auf |
Aus |
Aus |
Auf |
51200 |
Aus |
Aus |
Aus |
Auf |
1000 |
Auf |
Auf |
Auf |
Aus |
2000 |
Aus |
Auf |
Auf |
Aus |
4000 |
Auf |
Aus |
Auf |
Aus |
5000 |
Aus |
Aus |
Auf |
Aus |
8000 |
Auf |
Auf |
Aus |
Aus |
10000 |
Aus |
Auf |
Aus |
Aus |
20000 |
Auf |
Aus |
Aus |
Aus |
40000 |
Aus |
Aus |
Aus |
Aus |
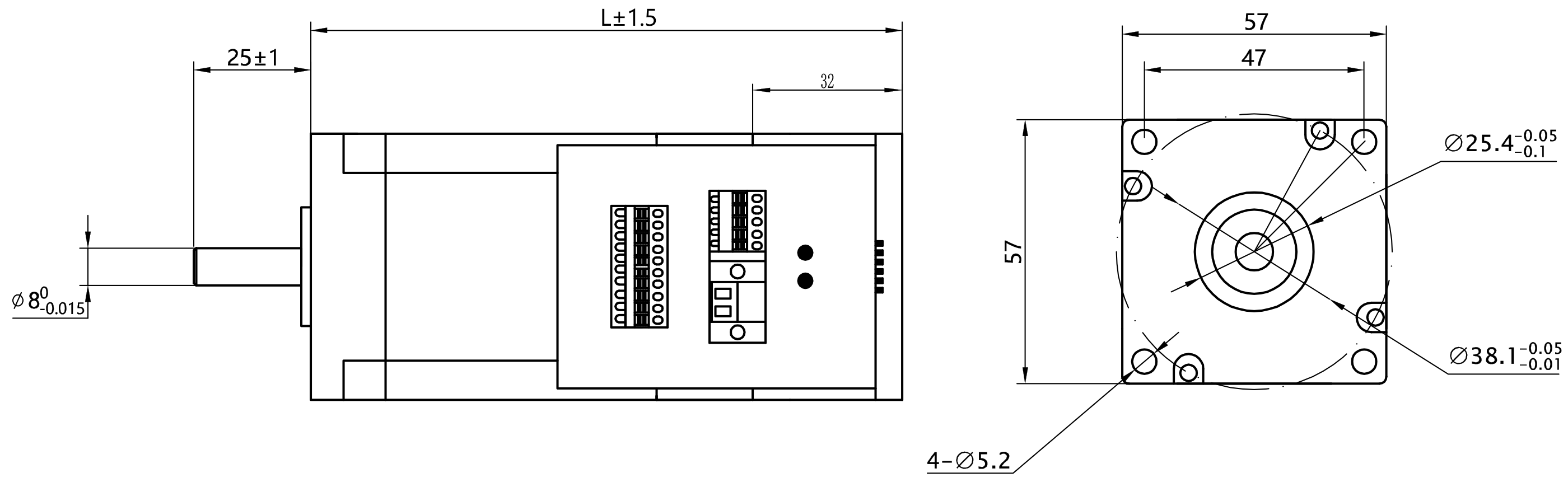
8.Motordimensionen (Einheit=mm)
Copyright © Changzhou Jinsanshi Mechatronics Co., Ltd. All rights reserved. - Datenschutzrichtlinie



