Startseite > Produkte > Schrittmotor und Treiber > Schrittfahrer

Unser STD3722 ist ein digitaler Schrittmotor, basierend auf DSP-Steuerung. Die von STD3722 angetriebenen Schrittmotoren können mit viel geringerem Lärm und viel weniger Vibrationen als andere Treiber auf dem Markt betrieben werden. Die Positionierungsgenauigkeit beträgt bis zu 60.000 Schritte/Umdrehung. Dieser Schritttriebwerk wird in großen und mittleren CNC-Geräten mit hoher Auflösung wie Gravurmaschinen, mittleren CNC-Werkzeugmaschinen, Computer-Brädermaschinen und Verpackungsmaschinen weit verbreitet.
1.Eigenschaften
● 3-phasen digitaler Schrittmotorantrieb, Verwendung von 32-Bit DSP-Technologie
● Geräuscharm, schwache Vibrationen und niedrige Temperaturerhöhungen
● Spannung 110v~220VAC
● Mit 8 Stufen Ausgangsstrom-Einstellung, Spitzenstrom 7.0A
● Mit 16 Stufen Mikrostepp-Unterteilungseinstellung, die höchste Auflösung von 60000 Schritten / Umdrehung
● Automatischer Halbstrom, Selbstprüfung, Schutz vor Überspannung, Unterspannung und Überstrom
● Interne optische Isolation, die höchste Reaktionsfrequenz von bis zu 200Kpps
● Geeignet für 3-Phasen nem42 Schrittmotor, nema 52 Schrittmotor zwischen 1.2-7.0A
● Wenn der Schrittimpuls länger als 100ms stoppt, wird der Spulenstrom automatisch auf die Hälfte des eingestellten Stroms reduziert, was die Motorwärme effektiv verringert
● Signalspannung: 5V ~ 24V kompatibel
● Betriebstemperatur: -30 ℃~ 85 ℃
2.Auswahl der Mikroschritt-Auflösung
Pulse/REV | d1 | d2 | D3 | D4 |
400 | auf | auf | auf | auf |
500 | auf | auf | auf | aus |
600 | auf | auf | aus | auf |
800 | auf | auf | aus | aus |
1000 | auf | aus | auf | auf |
1200 | auf | aus | auf | aus |
2000 | auf | aus | aus | auf |
3000 | auf | aus | aus | aus |
4000 | aus | auf | auf | auf |
5000 | aus | auf | auf | aus |
6000 | aus | auf | aus | auf |
10000 | aus | auf | aus | aus |
12000 | aus | aus | auf | auf |
20000 | aus | aus | auf | aus |
30000 | aus | aus | aus | auf |
60000 | aus | aus | aus | aus |
3.Standesordnung
Aktuell | d1 | d2 | D3 | D4 |
1.2A | aus | aus | aus | aus |
1.5A | aus | aus | aus | auf |
2,0A | aus | aus | auf | aus |
2.3A | aus | aus | auf | auf |
2.5A | aus | auf | aus | aus |
3.0A | aus | auf | aus | auf |
3.2A | aus | auf | auf | aus |
3.6A | aus | auf | auf | auf |
D5: ON, doppelter Impuls: PU ist das vorwärtsstehende Schrittimpulssignal, DR ist das rückwärtsstehende Schrittimpulssignal; OFF, einziger Impuls: PU ist das Schrittimpulssignal, DR ist das Richtungssteuerungssignal
D6: automatischer Erkennungsschalter (AUS beim Empfang eines externen Impulses, EIN zum inneren Drehzahl von 30 R/min)
4.Beschreibung der Signalhäfen (DB15)
Portdefinition | PIN-Nummer | Symbol | Merkmale | Anmerkungen |
RS-232 | 1 | RX | Daten empfangen | Verbunden mit dem Controller-Port TX (Funktion beibehalten) |
2 | TX | Daten senden | Verbunden mit dem Controller-Port RX (Funktion beibehalten) | |
8 | GND | Grundlinie | Verbunden mit der Erdung des Controller-Ports (Funktion beibehalten) | |
DB15 | 1 | PU+ | Positive Endstation des Eingangspulssignals | Anschließen Sie die Signalstromversorgung, +5V~+24V kann angetrieben werden |
2 | - Was ist das? | DP5=OFF, PU ist Schrittimpuls-Signal | Die fallende Kante ist gültig. Wenn der Puls von hoch auf niedrig geht, macht der Motor einen Schritt, und der interne Strombegrenzungswiderstand 220Ω erfordert: Niedrigpegel 0~0,5V, Hochpegel 24V oder weniger, Pulsbreite >2,5μS | |
DP5=ON, PU ist positives Phasen-Schrittimpuls-Signal | ||||
3 | DR+ | Eingangsrichtungsignal positiver Anschluss | Schließen Sie die Signalleistung an, + 5V~ +24V können betrieben werden | |
4 | DR- | DP5=OFF, DR ist das Richtungspulsignal | Wird verwendet, um die Motorsteuerung zu ändern. Anforderungen: Niedrigpegel 0-0,5V, Hochpegel 24V oder weniger, Pulsbreite >2,5μS | |
DP5=ON, DR ist das Rückwärts-Pulsignal | ||||
5 |
MF+ | Eingangs-Motorfreigabesignal (Aktivierungssignal) positiver Anschluss | Anschließen Sie die Signalstromversorgung, +5V~+24V kann angetrieben werden | |
6 |
MF- | Motorfreigabesignal (Aktivierungssignal) negativer Anschluss | Wenn der Motor stromlos ist und der Treiber nicht arbeitet, befindet sich der Motor im Freilaufzustand | |
7 | nC |
| nicht gültig | |
8 | nC |
| nicht gültig | |
9 | ALM+ | Positives Endgerät für das Ausgangssignal | Überstrom- und Überhitzwahrung | |
10 | - Ich weiß nicht. | Fehlerausgangssignal negativer Anschluss |
| |
11 | RDY+ | Bereit-Ausgangssignal positives Endgerät | Anzeigen, dass der Fahrer zur Arbeit bereit ist | |
12 | - Das ist RDY. | Bereit-Ausgangssignal negative Endstation |
| |
13, 14, 15 | nC |
| nicht gültig | |
Motor, Stromversorgungsseite | 1,2 | L,N | Stromversorgung | 110 V ~ 220 V |
3 | PE | Grundlinie | Erd (eingebettete Antriebshülle) | |
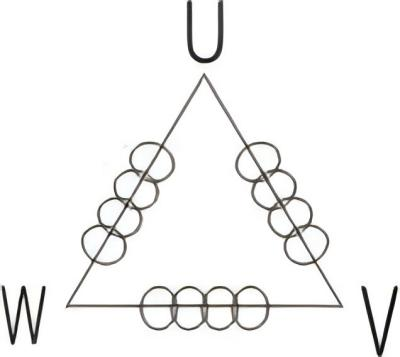
4 | U | Motorleitungen |
| |
5 | v | |||
6 | W |
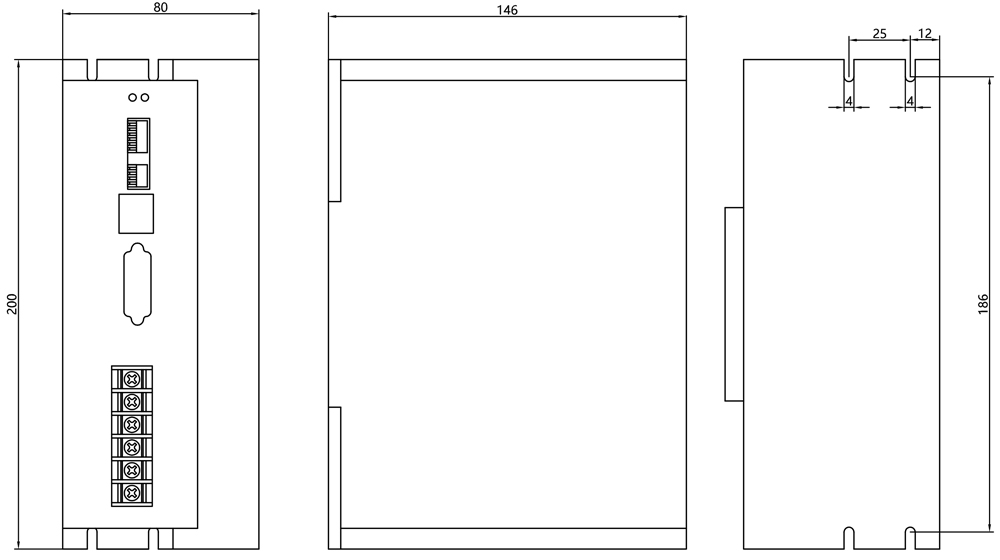
5.Gesamtdimensionen
Copyright © Changzhou Jinsanshi Mechatronics Co., Ltd. All rights reserved. - Datenschutzrichtlinie