

Etusivu > Tuotteet > Vaihtomoottori ja -kuljettajat > Asennus- ja käyttöohjaus

DM422 on tehokas digitaalinen askelpyörä, - joka perustuu DSP:hen ja kehittyneeseen ohjausalgoritmiin. DM422:n ohjaamat askelmoottorit voivat toimia huomattavasti vähemmän melua ja värähtelyä käyttäen kuin muut markkinoilla olevat moottorit. DM422-vaiheisten ajureiden ominaispiirteet ovat pienempi melua, pienempi värähtely ja pienempi lämmitys. Vaiheohjaimen jännitys on 20 V-40 V tasavirta. Se soveltuu kaikkiin hybridivaiheisiin askelmoottoreihin, joiden virta on alle 2,2 A. DM422:n askelluvun enimmäismäärä on 6400 askelta/kiertoa (mikrosetki on 1/32). Sen virtausvalikoima on 0,5 A ~ 2,2 A. DM422:n automaattinen puolivirtaus, ylin jännitte, ylin jännitte ja ylin virta suojaa. DM422-askelkuljettajamme voidaan käyttää erilaisissa pienimuotoisissa automaatiolaitteissa ja -laitteissa, kuten merkintä-, leikkaus-, pakkaus-, piirustus-, kaiverrus- ja CNC-laitteissa.
1.Erityypit
● 32-bittisen DSP:n käyttöönotto, puhdas sinus-aaltojen jakaminen
● Vähä melua, vähäisiä tärinää ja alhaista lämpötilan nousua
● Jännite 20~40VDC
● 8-porttista lähtövirran asetusta, huippuvirta 2.2A
● 4-porttista mikroaskeljakosetusta
● Automaattinen puolivirta, itsetesti, ylipinta, ylipinta, ylipinta suoja
● Sisäinen optinen eristys, korkein taajuus 200KHZ.
● Sopii virralle 0.5~2.2A 2-vaiheisille, 4-vaiheisille hybridivaihemoottoreille
2. Mikrosetkinvalinta
Pulssit/REV |
SW5 |
SW6 |
Oletus |
Päällä |
Päällä |
1600 |
- Ei, ei, ei. |
Päällä |
3200 |
Päällä |
- Ei, ei, ei. |
6400 |
- Ei, ei, ei. |
- Ei, ei, ei. |
Pysäys: Pulssi voidaan mukauttaa asiakkaiden vaatimuksiin.
3.Nykyinen asetus
Pisteet |
RMS:n määrä |
SW1 |
SW2 |
SW3 |
Oletus |
Päällä |
Päällä |
Päällä |
|
0.5A |
0,35 A |
- Ei, ei, ei. |
Päällä |
Päällä |
0,70 A |
0,50 A |
Päällä |
- Ei, ei, ei. |
Päällä |
1.0A |
0,70 A |
- Ei, ei, ei. |
- Ei, ei, ei. |
Päällä |
1.30 A |
0,90 A |
Päällä |
Päällä |
- Ei, ei, ei. |
1.60A |
1.20 A |
- Ei, ei, ei. |
Päällä |
- Ei, ei, ei. |
1.90A |
1.40 A |
Päällä |
- Ei, ei, ei. |
- Ei, ei, ei. |
2.20 A |
1.60A |
- Ei, ei, ei. |
- Ei, ei, ei. |
- Ei, ei, ei. |
Käyttäjät voivat asettaa askelmoottorin ohjaimen puoli-virta-toiminnon SW4:llä. "OFF" tarkoittaa, että lepotila-virta on asetettu puoleen dynaamisesta virrasta. "ON" tarkoittaa, että lepotila-virta ja dynaaminen virta ovat samat. Käyttäjien tulisi asettaa SW4 "OFF":iin, jotta moottorin ja ohjaimen lämpenemistä voidaan vähentää ja luotettavuutta parantaa.
4.Sovelluksen kuvaus
Signaali |
Toiminto |
Kuvaus |
PWR |
Vähäiset |
Voiman osoitin on vihreä. Kun askelpyöräohjain kytketään päälle, vihreä valo palaa aina. Virheilukuvaus on punainen, kun on ylipinnan tai ylipinnan vika, punainen valo on aina päällä; kun kuljettajan vika on selvitetty, jos virtaa palautetaan, punainen valo on pois päältä. |
PUL |
Signaaliliittymät |
PUL on asennuspulssiulento; DIR on askelmoottorin suunnanulento; OPTO on signaaliportin + 5V virtalähde; ENA on moottorin vapaa tulo. |
DIR:n | ||
OTO:n | ||
ENA:n määrä | ||
GND |
Voimankäyttöliittymät |
Askelmoottorin ohjain käyttää tasavirta-virtalähdettä. Suositeltu käyttöjännite on 20VDC~40VDC, ja tehonkulutuksen tulisi olla suurempi kuin 100W. |
+Vdc | ||
A+ |
Moottorin käyttöliittymät |
A+ ja A- on kytketty moottorin vaiheikalkuun; B+ ja B on kytketty moottorin toiseen vaiheikalkuun. Jos haluat kääntyä taaksepäin, yksi vaihevyöhtö voidaan kääntää. |
- Mitä sinä teet? | ||
B+ | ||
- Ei, ei, ei. |
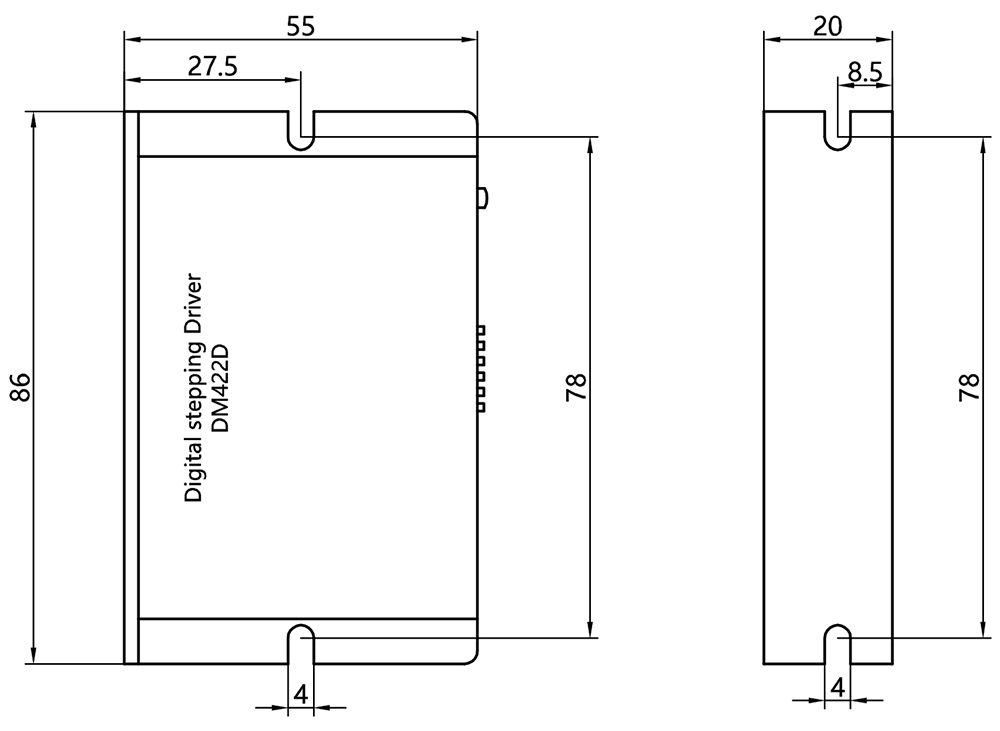
5.Yleiset ulottuvuudet
Copyright © Changzhou Jinsanshi Mechatronics Co., Ltd. All rights reserved. - Yksityisyyskäytännöt



