

Etusivu > Tuotteet > Servojärjestelmä > Integroidut tasavirta-servo-moottorit

JSV57 integroitu servomoottori on 57 mm kehyksetön brushless DC-moottori, joka on yhdistetty 16-bittisellä koodaajalla ja servodraivilla. Tämä DC-servomoottori käyttää 32-bittistä ARM-purkua ja optimoituja ohjausalgoritmeja, mikä takaa erinomaisen suunnittelun ja kompaktin kokoon. Integroidyn designi draivin ja moottorin välillä säästää niiden yhteyden, sekä tehokkaasti vähentää elektromagneettista häiriötä. Se käyttää parempaa värinkestotekniikkaa ja alhaisempaa lämpötilaa, mikä ratkaisee tehokkaasti ongelmia liittyen lämpötilaan ja meluun.
1.Erityypit
2. Tyypillinen sovellus
Kelpoo monenlaisille pienille ja keskisuuruisille automaatiojärjestelmille ja laitteille, kuten inkjet-tulostimille, pienille ja keskisuuruisille murskauslaadoille, elektronisille käsittelylaitteille, automaattisille otto-laitteille, erikoisille CNC-moottoreille, pakkausaluksille jne. Se on erityisen tehokas laitteissa, joissa käyttäjät odottavat alhaisempaa melua ja korkeampaa nopeutta.
3.Sähköiset indikaattorit
Parametrit |
JSV57 |
|||
Min |
Tyypillinen arvo |
Max |
Yksikkö |
|
Jatkuva tulostusvirta |
0 |
- |
6 |
A |
Syöttöjännite |
24 |
36 |
48 |
VDC |
Loginen syöttövirta |
7 |
10 |
16 |
- Äiti. |
Logiikka syöttöjännite |
5 |
5 |
24 |
V |
Pulssin taajuus |
0 |
- |
200 |
kHz |
Eristysvastus |
100 |
|
|
MΩ |
4.Sähköinen määritys
Yksikkö |
JSV57-09V36 |
JSV57-14V36 |
JSV57-18V36 |
|
Faasit |
|
3 |
||
Puolalaiset |
|
8 |
||
Jännite |
|
36VDC |
||
Nimellinen teho |
L |
90 |
140 |
180 |
Nimetyn vääntömomentin |
N.m |
0.28 |
0.45 |
0.57 |
Huipputorque |
N.m |
0.8 |
1.1 |
1.5 |
Nimellisnopeus |
vuoro |
3000 |
3000 |
3000 |
Nimellisvirta |
A |
3.3 |
5 |
6.6 |
5. Ajojärjestelmän liittymän ja kabeloinnin johdanto
(1)Voimansyöttöportti
Pysäkkeen numero |
Symboli |
Name |
Havainnollistaa |
1 |
+Vdc |
Jatkuvan virran positiivinen päätelaite |
Sähkövirta + 24V ~ 48V |
2 |
GND |
Vähävirtausmaasto |
0V |
(2) Ohjaussignaaliportti
Pysäkkeen numero |
Symboli |
Name |
Havainnollistaa |
1 |
PUL + |
Pulssitulo + |
Yhteensopiva 5V~24V signaalien kanssa |
2 |
PUL - |
Pulssitulo - |
|
3 |
DIR + |
Suuntasyöttö + |
|
4 |
DIR - |
Suuntasyöttö - |
|
5 |
ENA + |
Ota syöttö + käyttöön |
|
6 |
ENA - |
Ota syöttö käyttöön - |
|
7 |
PED + |
Sijaintisignaalilähtö + |
|
8 |
PED - |
Sijaintisignaalin lähtö - |
|
9 |
ALM + |
Hälytyssignaalin lähtö + |
|
10 |
ALM - |
Hälytyssignaalin lähtö - |
(3) RS232 -viestintäportti
Pysäkkeen numero |
Symboli |
Name |
Havainnollistaa |
1 |
NC |
|
|
2 |
RX |
RS232- vastaanotin |
|
3 |
GND |
Voimalaitos |
|
4 |
TX |
RS232-lähettäjä |
|
5 |
+5 V |
Positiivinen virtalähte |
(Tätä ei tarvitse yhdistää) |
(4)Tilanne-ilmoitus
PWR: Virrankorvausindikaattori. Vihreä indikaattori syttyy, kun virrantahti on päällä.
ALM: Virhe-indikaattori. Kun virhe tapahtuu, indikaattori vilkuttaa 5 sekunnin taajuudella; kun käyttäjä poistaa virheen, punainen LED pysyy aina pois päältä. Punainen LED vilkuttaa 2Hz taajuudella, jossa LED on päällä 200ms ja pois 300ms. Punaisen LED:n vilkkumiskerrat 5 sekunnissa edustavat eri virheiden tietoja, ja tarkka suhde näytetään seuraavassa taulukossa:
Seurannumero |
Vilkumiskerrat |
Virhekuvaus |
1 |
1 |
Ylivirtausvirhe |
2 |
2 |
Sijaintivirheen toleranssialarmpi |
3 |
3 |
Koodin virhe |
4 |
4 |
Moottorin ylikuormitus |
5 |
5 |
Bussin liian korkea jännite |
6 |
6 |
Bussin liian matala jännite |
6.DIP-sytytin asetus
7. Syöttökomentojen suodatus
Kun DIP-kytkettä S1 asetetaan PAALLÄ, syöttösuojausfunktio otetaan käyttöön, ja suodatusaika määritellään reisterillä 2603; tämä funktio on voimassa vain, kun moottori on avoinna;
JSV57 -ajurissa käytetään kuudeksiosaisia DIP-kytkimiä asettamaan alajakotarkkuus ja moottorin pyörityssuunta.
(1) Suuntasettelu
Suunnan |
S2 |
CCW |
- Ei, ei, ei. |
CW |
Päällä |
(2) Mikroaskelasetus
Pulssit/REV |
S3 |
S4 |
S5 |
S6 |
Oletus |
Päällä |
Päällä |
Päällä |
Päällä |
400 |
Päällä |
Päällä |
Päällä |
Päällä |
800 |
- Ei, ei, ei. |
Päällä |
Päällä |
Päällä |
1600 |
Päällä |
- Ei, ei, ei. |
Päällä |
Päällä |
3200 |
- Ei, ei, ei. |
- Ei, ei, ei. |
Päällä |
Päällä |
6400 |
Päällä |
Päällä |
- Ei, ei, ei. |
Päällä |
12800 |
- Ei, ei, ei. |
Päällä |
- Ei, ei, ei. |
Päällä |
25600 |
Päällä |
- Ei, ei, ei. |
- Ei, ei, ei. |
Päällä |
51200 |
- Ei, ei, ei. |
- Ei, ei, ei. |
- Ei, ei, ei. |
Päällä |
1000 |
Päällä |
Päällä |
Päällä |
- Ei, ei, ei. |
2000 |
- Ei, ei, ei. |
Päällä |
Päällä |
- Ei, ei, ei. |
4000 |
Päällä |
- Ei, ei, ei. |
Päällä |
- Ei, ei, ei. |
5000 |
- Ei, ei, ei. |
- Ei, ei, ei. |
Päällä |
- Ei, ei, ei. |
8000 |
Päällä |
Päällä |
- Ei, ei, ei. |
- Ei, ei, ei. |
10000 |
- Ei, ei, ei. |
Päällä |
- Ei, ei, ei. |
- Ei, ei, ei. |
20000 |
Päällä |
- Ei, ei, ei. |
- Ei, ei, ei. |
- Ei, ei, ei. |
40000 |
- Ei, ei, ei. |
- Ei, ei, ei. |
- Ei, ei, ei. |
- Ei, ei, ei. |
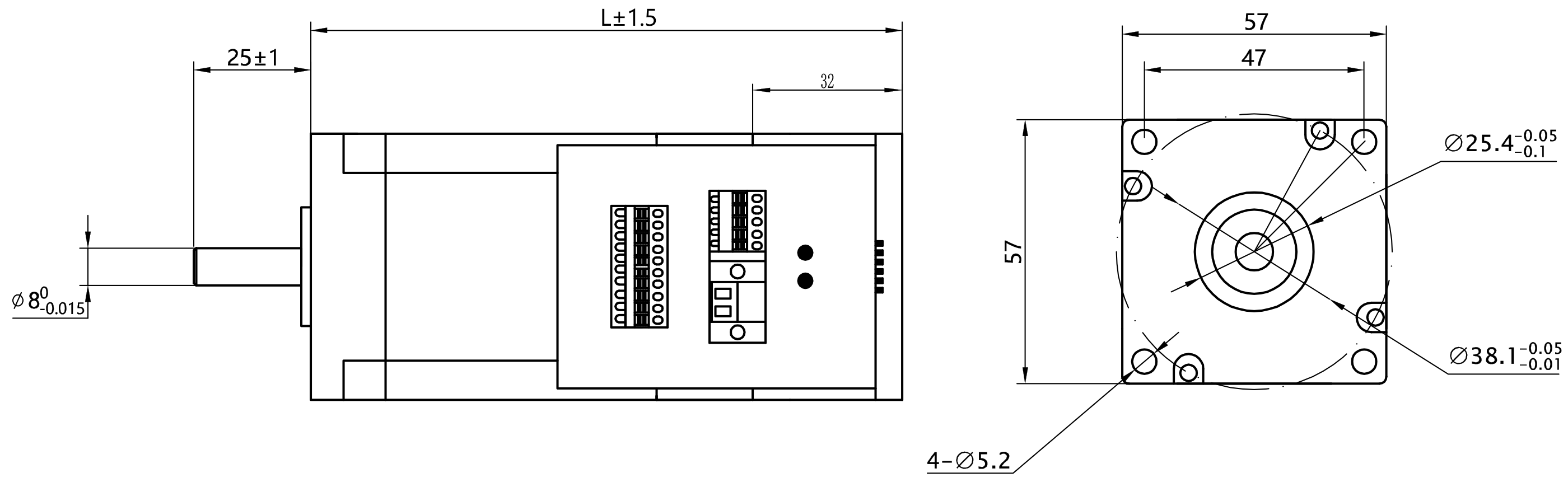
8. Moottorin mitat (yksikkö=mm)
Copyright © Changzhou Jinsanshi Mechatronics Co., Ltd. All rights reserved. - Yksityisyyskäytännöt



