Etusivu > Tuotteet > Vaihtomoottori ja -kuljettajat > Asennus- ja käyttöohjaus

STD3722 on digitaalinen askelmoottori, joka perustuu DSP-ohjaukseen. STD3722:n ohjaamat askelmoottorit voivat toimia huomattavasti vähemmän melua ja värähtelyä käyttäen kuin muut markkinoilla olevat moottorit. Asennus tarkkuus voi olla jopa 60 000 askelta/vallankumous. Tätä askelpyöräistä kuljetinta käytetään laajalti suurissa ja keskisuurissa, korkean resoluution CNC-laitteissa, kuten kaiverruskoneissa, keskisuurissa CNC-työkaluissa, tietokonepohjaisissa koneissa ja pakkauskoneissa.
1.Erityypit
● Kolmivaiheinen digitaalinen askelpyöräohjain, 32-bittinen DSP-teknologia
● Vähä melua, vähäisiä tärinää ja alhaista lämpötilan nousua
● Jännite 110V~220VAC
● 8 asennettavan virran laittaminen, huipputaso 7,0A
● 16 aseman mikrostappisuuntaus, korkein resoluutio 60000 askelta/kierroksessa
● Automaattinen puolivirta, itsetesti, ylipinta, ylipinta, ylipinta suoja
● Sisäinen optinen eristäminen, korkein 200 Kpp:n vastaustaajuus
● Soveltuu 3-vaiheiseen nem42 askelmoottoriin, nem52 askelmoottoriin 1,2 - 7,0A:n välillä
● Kun askelpulssi pysähtyy yli 100 ms:n ajan, kaapelikuranta pienenee automaattisesti puolet asetetusta virrasta, mikä vähentää tehokkaasti moottorin lämpöä
● Signaalijännitys: 5V ~ 24V yhteensopiva
● Työlämpötila: -30 °C ~ 85 °C
2. Mikrosetkinvalinta
Pulssit/REV |
D1 |
D2 |
D3 |
D4 |
400 |
Päällä |
Päällä |
Päällä |
Päällä |
500 |
Päällä |
Päällä |
Päällä |
- Ei, ei, ei. |
600 |
Päällä |
Päällä |
- Ei, ei, ei. |
Päällä |
800 |
Päällä |
Päällä |
- Ei, ei, ei. |
- Ei, ei, ei. |
1000 |
Päällä |
- Ei, ei, ei. |
Päällä |
Päällä |
1200 |
Päällä |
- Ei, ei, ei. |
Päällä |
- Ei, ei, ei. |
2000 |
Päällä |
- Ei, ei, ei. |
- Ei, ei, ei. |
Päällä |
3000 |
Päällä |
- Ei, ei, ei. |
- Ei, ei, ei. |
- Ei, ei, ei. |
4000 |
- Ei, ei, ei. |
Päällä |
Päällä |
Päällä |
5000 |
- Ei, ei, ei. |
Päällä |
Päällä |
- Ei, ei, ei. |
6000 |
- Ei, ei, ei. |
Päällä |
- Ei, ei, ei. |
Päällä |
10000 |
- Ei, ei, ei. |
Päällä |
- Ei, ei, ei. |
- Ei, ei, ei. |
12000 |
- Ei, ei, ei. |
- Ei, ei, ei. |
Päällä |
Päällä |
20000 |
- Ei, ei, ei. |
- Ei, ei, ei. |
Päällä |
- Ei, ei, ei. |
30000 |
- Ei, ei, ei. |
- Ei, ei, ei. |
- Ei, ei, ei. |
Päällä |
60000 |
- Ei, ei, ei. |
- Ei, ei, ei. |
- Ei, ei, ei. |
- Ei, ei, ei. |
3.Nykyinen asetus
Nykyinen |
D1 |
D2 |
D3 |
D4 |
1.2A |
- Ei, ei, ei. |
- Ei, ei, ei. |
- Ei, ei, ei. |
- Ei, ei, ei. |
1.5A |
- Ei, ei, ei. |
- Ei, ei, ei. |
- Ei, ei, ei. |
Päällä |
2.0A |
- Ei, ei, ei. |
- Ei, ei, ei. |
Päällä |
- Ei, ei, ei. |
2.3A |
- Ei, ei, ei. |
- Ei, ei, ei. |
Päällä |
Päällä |
2.5A |
- Ei, ei, ei. |
Päällä |
- Ei, ei, ei. |
- Ei, ei, ei. |
3.0A |
- Ei, ei, ei. |
Päällä |
- Ei, ei, ei. |
Päällä |
3.2A |
- Ei, ei, ei. |
Päällä |
Päällä |
- Ei, ei, ei. |
3.6A |
- Ei, ei, ei. |
Päällä |
Päällä |
Päällä |
D5: ON, kaksoispulssi: PU on eteenpäin siirtymäpulssisignaali, DR on taaksepäin siirtymäpulssisignaali; OFF, yksittäispulssi: PU on askelpulssisignaali, DR on suunnanhallintasignaali
D6: automaattinen havaintopyssin (PÄÄÄNNÄ ulkomaanpulssin vastaanottamisen yhteydessä, SYSTÄMINEN 30 r/min:n sisäiseen nopeuteen)
4.Signaaliportit (DB15) Kuvaus
Sataman määritelmä |
PIN-numero |
Symboli |
PIIRTEITÄ |
Huomautus |
RS-232:n käyttö |
1 |
RX |
Tietojen vastaanottaminen |
Liittynyt ohjaamon porttiin TX (toiminta säilytetään) |
2 |
TX |
Lähetä tietoja |
Liittynyt ohjaimen porttiin RX (toiminta säilytetään) |
|
8 |
GND |
Maapintaviiva |
Sähköllä on oltava yhteys ohjaimen kentän maantieteelliseen johtoon (toimintojen säilyttäminen) |
|
|
DB15:n |
1 |
PU+ |
Tulosimpulssisignaalin positiivinen päätelaite |
yhdistää signaalin virtalähde, +5V~+24V voidaan ajaa |
2 |
- Ei, ei, ei, ei. |
DP5=OFF, PU on askelpulssisignaali |
- Ranta on hyvä. Kun pulssin lämpö on korkealta alhaalta, moottori ottaa askeleen, ja sisäisen virran rajoittava vastus 220Ω vaatii: matala taso 0~0,5V, korkea taso 24V tai vähemmän, pulssin leveys >2,5 μS |
|
DP5=ON, PU on positiivinen vaihevaiheen pulssisignaali | ||||
3 |
DR+ |
Syöttösuuntaussignaalin positiivinen päätelaite |
yhdistää signaalin virtalähde, + 5V ~ + 24V voidaan ajaa |
|
4 |
DR- |
DP5=OFF, DR on suunnanpulssisignaali |
- Vaihdoin ohjausmoottoria. Vaatimukset: matala taso 0-0,5 V, korkea taso 24 V tai pienempi, pulssin leveys > 2,5 μS |
|
DP5=ON, DR on käänteinen pulssisignaali | ||||
|
5 |
MF+ |
Input-moottorin vapautussignaali (voimaantumissignaali) positiivinen päätelaite |
yhdistää signaalin virtalähde, +5V~+24V voidaan ajaa |
|
|
6 |
MF- |
Moottorin vapautussignaali (käynnistyssignaali) negatiivinen päätelaite |
Kun moottori on sammutettu ja kuljettaja lopettaa toimintansa, moottori on vapaassa tilassa |
|
7 |
NC |
|
ei ole voimassa |
|
8 |
NC |
|
ei ole voimassa |
|
9 |
ALM+ |
Virheen johtamissignaalin positiivinen päätelaite |
ylikuormitus- ja ylikuumenemisharjoitus |
|
10 |
- Ei, ei, ei. |
Virheen johtamissignaalin negatiivinen päätelaite |
|
|
11 |
RDY+ |
Valmis lähtösignaali positiivinen terminaali |
Ilmoita, että kuljettaja on valmis työskentelemään |
|
12 |
- RYK:n kanssa. |
Valmis lähtösignaali negatiivinen päätepiste |
|
|
13, 14, 15 |
NC |
|
ei ole voimassa |
|
Moottori, virtalähteen puoli |
1,2 |
L,N |
Virranlähtö |
110 v ~ 220 v |
3 |
PE |
Maapintaviiva |
Maapallo (sisäasennettu ajokäyttö) |
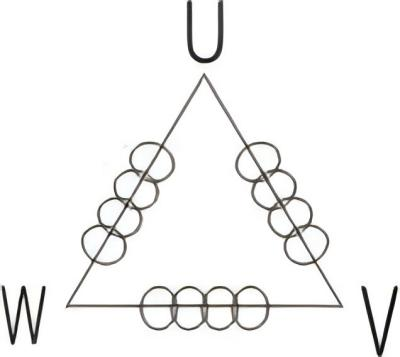
|
4 |
U |
Moottoritiet |
|
|
5 |
V |
|||
6 |
L |
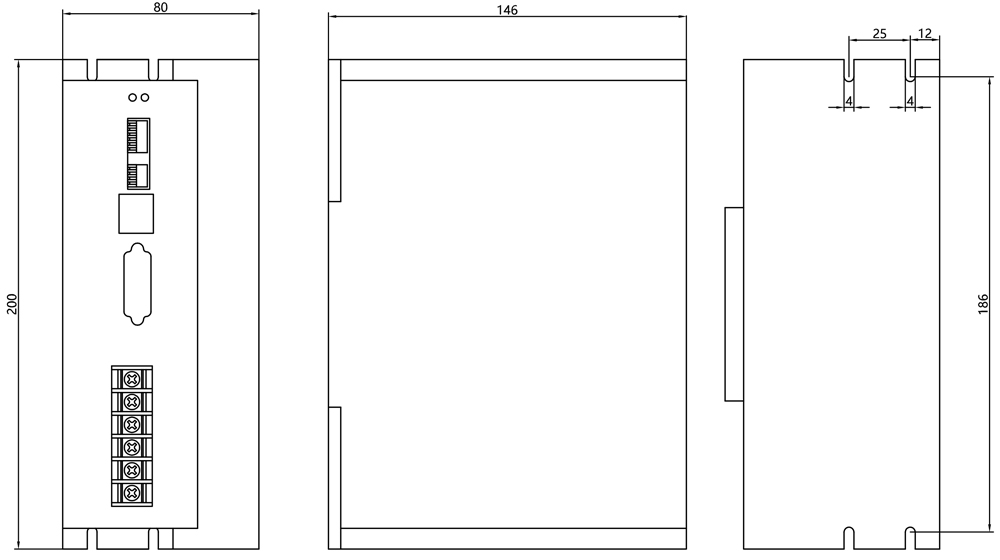
5.Yleiset ulottuvuudet
Copyright © Changzhou Jinsanshi Mechatronics Co., Ltd. All rights reserved. - Yksityisyyskäytännöt