

Page d'accueil > Produits > Moteur pas à pas et conducteurs > Le pilote à pas

Notre pilote DM542 adopte la technologie de conduite à courant constant bipolaire, il fonctionne de façon stable, fournit un excellent couple. Le DM542 est à faible bruit, vibration et chauffage. La tension du conducteur pas à pas est de DC18~50V. Elle s'applique aux moteurs hybrides pas à pas à deux phases sous courant 4.2A. Le DM542 a 15 types de microstapes. Le nombre maximal de pas est de 25600 pas/rev (microstep est 1/128). Le courant de fonctionnement maximal varie de 1,0 A à 4,2 A et le courant de sortie a 8 stands. Le pilote pas à pas DM542 a des fonctions de protection automatique contre le demi-débit, la surtension, la sous-tension et le sur courant. Notre pilote pas à pas DM542 peut être appliqué dans une variété d'équipements et d'instruments d'automatisation à petite échelle, tels que la machine d'étiquetage, la machine de découpe, la machine d'emballage, la machine de dessin, la machine de gravure, la machine CNC
1. Caractéristiques
● Adoption de la technologie de division des ondes sinusoïdes de 32 bits
● Faible bruit, faible vibration et faible élévation de température
● Voltage de 18 à 50 VDC
● Avec 8 stands de réglage de courant de sortie, courant de pointe4,2A
● Avec 15 stands, le système de subdivision en micro-étape
● Protection automatique contre le demi-courant, auto-test, surtension, sous tension, surtension
● Isolement optique interne, réponse à fréquence maximale de 200 KHz.
● Convient pour une plage de courant de 1,0 à 4,2 A à deux phases, à quatre phases, à l'aide d'un moteur pas à pas nema 23, d'un moteur pas à pas nema 34
2.Sélection de la résolution en microstep
Pouls/REV |
SW5 |
Le numéro de série |
Le numéro SW7 |
SW8 |
400 |
Éteint |
Sur |
Sur |
Sur |
800 |
Sur |
Éteint |
Sur |
Sur |
1600 |
Éteint |
Éteint |
Sur |
Sur |
3200 |
Sur |
Sur |
Éteint |
Sur |
6400 |
Éteint |
Sur |
Éteint |
Sur |
12800 |
Sur |
Éteint |
Éteint |
Sur |
25600 |
Éteint |
Éteint |
Éteint |
Sur |
1000 |
Sur |
Sur |
Sur |
Éteint |
2000 |
Éteint |
Sur |
Sur |
Éteint |
4000 |
Sur |
Éteint |
Sur |
Éteint |
5000 |
Éteint |
Éteint |
Sur |
Éteint |
8000 |
Sur |
Sur |
Éteint |
Éteint |
10000 |
Éteint |
Sur |
Éteint |
Éteint |
20000 |
Sur |
Éteint |
Éteint |
Éteint |
25000 |
Éteint |
Éteint |
Éteint |
Éteint |
Par défaut: l'impulsion peut être personnalisée selon les exigences du client.
3.Réglage actuel
Picote |
RMS |
SW1 |
SW2 |
SW3 |
1,00A |
0,71A |
Sur |
Sur |
Sur |
1.46A |
1.04A |
Éteint |
Sur |
Sur |
1.92A |
1.36A |
Sur |
Éteint |
Sur |
2.37A |
1.69A |
Éteint |
Éteint |
Sur |
2.84A |
2.03A |
Sur |
Sur |
Éteint |
3.32A |
2.36A |
Éteint |
Sur |
Éteint |
3.76A |
2.69A |
Sur |
Éteint |
Éteint |
4.20A |
3,00A |
Éteint |
Éteint |
Éteint |
Les utilisateurs peuvent régler la fonction de demi-débit du moteur pas à pas avec SW4. « OFF » indique que le courant de repos est réglé à la moitié du courant dynamique, « ON » indique que le courant de repos et le courant dynamique sont identiques. L'utilisateur peut régler SW4 sur « OFF », afin de réduire l'échauffement du moteur et du moteur et d'améliorer la fiabilité.
4.Description de l'interface
Le signal |
Fonction |
Description |
RPW/ALM |
Feux d'indicateur |
L'indicateur d'alimentation est vert. Lorsque le pilote pas à pas est sous tension, la lumière verte reste toujours allumée. L'indicateur de défaut est rouge, lorsqu'il y a un défaut de surtension ou de surcourant, la lumière rouge reste toujours allumée ; après que le défaut du pilote soit éliminé, si l'on remet sous tension, la lumière rouge s'éteindra. |
Le numéro de série de la commande |
Interfaces de signaux |
PUL est l'entrée de pulse de réglage ; DIR est l'entrée de direction du moteur pas à pas ; OPTO est l'alimentation pour le port de signal + 5V ; ENA est l'entrée libre du moteur. |
DIR+/DIR- | ||
Les données sont fournies par le système de référence ENBL+/ENBL- | ||
Je suis à Washington. |
Interfaces de puissance |
Le pilote pas à pas utilise une alimentation en courant continu. La tension de fonctionnement recommandée est de 18 VDC à 50 VDC et la consommation d'énergie doit être supérieure à 100 W. |
DC+ | ||
A+ |
Interfaces moteurs |
A+ et A- sont connectés à un enroulement de phase du moteur ; B+ et B sont connectés à un autre enroulement de phase du moteur. Si vous devez inverser l'un des enroulements de phase, vous pouvez le faire. |
Je suis... | ||
B+ | ||
Je suis désolé. |
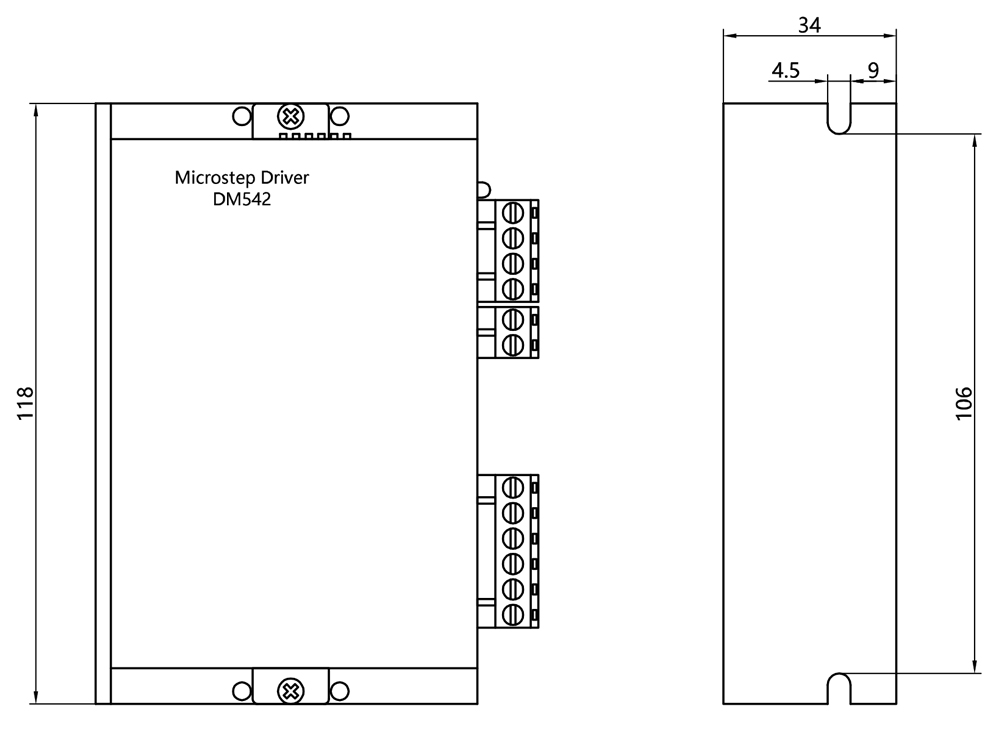
5.Dimensions générales
Copyright © Changzhou Jinsanshi Mechatronics Co., Ltd. All rights reserved. - Politique de confidentialité



