

Page d'accueil > Produits > Servo-moteurs à pas intégrés > RS485 Servo moteurs à pas intégrés

Notre JSS57R est un servo-moteur hybride intégré basé sur le bus RS485 qui prend en charge le protocole Modbus RTU. Ce produit intègre le servo-moteur hybride et le pilote et utilise le protocole de communication de bus Modbus RTU standard pour le contrôle. Comparé à la combinaison traditionnelle de moteur pas à pas et de moteur pas à pas, le rendement en termes de coûts est plus élevé. Ce produit servo hybride intégré intègre les avantages du contrôle de la communication de bus, du câblage simple, de l'absence d'étapes perdues, d'une faible augmentation de température, d'un faible bruit, d'une grande vitesse, d'un couple élevé et d'un faible C'est un produit de contrôle de mouvement très rentable.
1. Caractéristiques
2.Specifications électriques
Modèle N° | Angle de pas | Longueur du moteur | Actuel /Phase | Résistance /Phase | Inductance /Phase | Le couple de maintien |
(°) | (L) mm | Une | Oh | mH | N.m. | |
Les données sont fournies par les autorités compétentes. | 1.8 | 56 | 4.2 | 0.4
| 1.2 | 1.2 |
Les données sont disponibles en ligne. | 1.8 | 76 | 4.2 | 0.5 | 1.8 | 2 |
Les données sont disponibles en ligne. | 1.8 | 112 | 4 | 0.9 | 4.0 | 3 |
3.Indicateurs électriques
Alimentation | DC24~48V, alimentation recommandée DC36V |
Courant de sortie | Période de pointe 6,0 A (courant varie avec la charge) |
Courant d'entrée logique | 7 à 16 mA, 10 mA recommandé |
Type de communication | Résultats |
taux de communication maximal | 115200bps |
Alimentation | DC24~48V, alimentation recommandée DC36V |
5.Environnement d'utilisation et paramètres
Méthode de refroidissement | Refroidissement naturel ou radiateur extérieur | |
Environnement d'utilisation | Utilisez les occasions | Évitez autant que possible la poussière, l'huile et les gaz corrosifs |
Température | 0 à 40°C | |
Humidité | 40 à 90% de RH | |
Vibration | 5,9 m/s2 Max | |
Température de stockage | -20°C à 80°C | |
6.Définition de l'interface
(1)Port d'entrée d'alimentation
Numéro du terminal | Le symbole | Nom | Donnez un exemple |
1 | +Vdc | Terminal positif de la puissance en courant continu | DC + 24V à 48V Apporte d'alimentation en courant continu + 36 V recommandée |
2 | Le GND | Correspondance de la terre |
(2) Port de signal de commande
Numéro du terminal | Le symbole | Nom | Donnez un exemple |
1 | Le CCW+ | Limite positive positive | Support de tension +5V à +24V |
2 | - Je ne sais pas. | Limite positive négative | |
3 | HOME+ | L'origine mécanique est positive | |
4 | Je suis chez moi. | Origine mécanique négative | |
5 | CW+ | Limite négative positive | |
6 | CW- | Limite négative négative | |
7 | PEND+ | Signal de sortie positif en position |
|
8 | Je suis là. | Sortie négative du signal en position | |
9 | L'ALM+ | Le signal d'alarme est en train de sortir. |
|
10 | Je suis là. | Sortie négative du signal d'alarme |
(3) Port de communication RS485
Numéro du terminal | Le symbole | Nom |
1 | Résistance à la compression | Interface de communication RS485 |
2 | - Je ne sais pas. | |
3 | Résistance à la compression | |
4 | - Je ne sais pas. | |
5 | Le GND |
|
(4)Indication de l'état
PWR : Indicateur de puissance. Lorsque l'alimentation est activée, la lumière indicatrice verte reste constamment allumée.
ALM : Indicateur de défaut. La lumière rouge clignote une fois dans les 3 secondes : défaut de surintensité ou de court-circuit phase à phase ; La lumière rouge clignote 2 fois de suite dans les 3 secondes : défaut de surtension ;
La lumière rouge clignote 7 fois de suite dans les 3 secondes : l'alarme d'erreur de position est hors tolérance.
7.Réglage de l'interrupteur DIP
JSS57R utilise un commutateur DIP de 6 bits pour régler le numéro de station d'entraînement et le débit baud de communication.
SW1~SW4: Réglage du numéro de la station de conduite. SW5~SW6: Débit de communication au baud du lecteur. Après que le numéro de la station esclave et le débit baud de communication aient été modifiés, il doit être allumé à nouveau pour prendre effet.
Numéro d'esclave | SW1 | SW2 | SW3 | SW4 |
Par défaut | sur | sur | sur | sur |
1 | Éteint | sur | sur | sur |
2 | sur | Éteint | sur | sur |
3 | Éteint | Éteint | sur | sur |
4 | sur | sur | Éteint | sur |
5 | Éteint | sur | Éteint | sur |
6 | sur | Éteint | Éteint | sur |
7 | Éteint | Éteint | Éteint | sur |
8 | sur | sur | sur | Éteint |
9 | Éteint | sur | sur | Éteint |
10 | sur | Éteint | sur | Éteint |
11 | Éteint | Éteint | sur | Éteint |
12 | sur | sur | Éteint | Éteint |
13 | Éteint | sur | Éteint | Éteint |
14 | sur | Éteint | Éteint | Éteint |
15 | Éteint | Éteint | Éteint | Éteint |
Remarque: le réglage du numéro de la station slave, lorsqu'il est dans le fichier par défaut, peut définir le numéro de la station slave en définissant le registre du numéro de la station slave (0x0020), la plage est de 1 à 31.
Taux de communication en baud | SW5 | Le numéro de série |
9600 | sur | sur |
19200 | Éteint | sur |
38400 | sur | Éteint |
115200 | Éteint | Éteint |
Note: lorsque le débit baud de communication est réglé à 9600 bps, le format de données série est fixé à 8 bits de données, sans parité et à 1 bit stop. Lorsque le format de données du port série est réglé sur trois autres débits baud, il est déterminé par le registre du format de données du port série (0x0021).
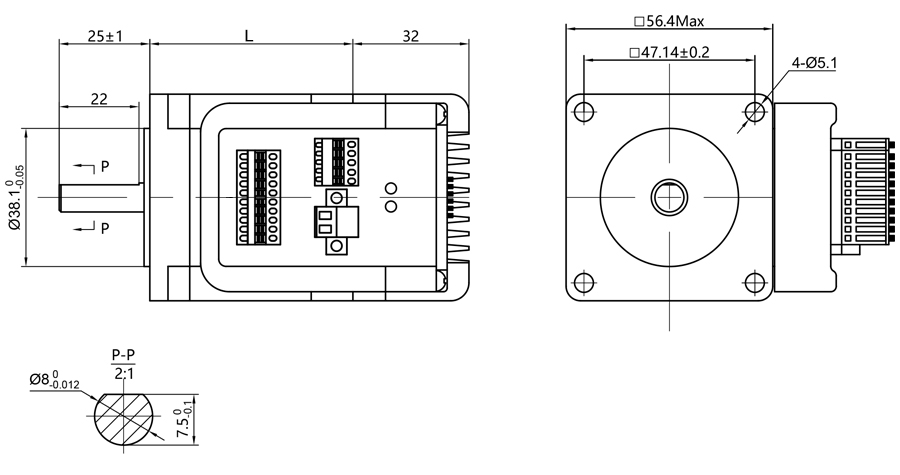
(8)Dimensions générales
Copyright © Changzhou Jinsanshi Mechatronics Co., Ltd. All rights reserved. - Politique de confidentialité



