

Page d'accueil > Produits > Système de servo > Servo moteurs à courant continu intégrés

Le moteur servo intégré JSV57 est un moteur sans balais de 57 mm avec un cadre intégrant un encodeur 16 bits et un entraînement servo. Ce moteur servo DC adopte un processeur ARM 32 bits et des technologies d'algorithme de contrôle optimisé, avec une conception exceptionnelle et une taille compacte. L'intégration du pilote et du moteur permet non seulement de supprimer les connexions entre le pilote et le moteur, mais réduit également efficacement les interférences électromagnétiques. Il utilise une technologie avancée de réduction des vibrations et de génération de chaleur, résolvant ainsi efficacement les problèmes de chauffe et de bruit.
1. Caractéristiques
2.Application typique
Convient à divers équipements et instruments d'automatisation de petite et moyenne taille, tels que les imprimantes jet d'encre, les graveuses de petite et moyenne taille, les équipements de traitement électronique, les dispositifs de saisie automatique, les CN spéciaux, les machines-outils, les équipements d'emballage, etc. Il est particulièrement efficace dans les équipements où les utilisateurs recherchent un faible niveau de bruit et une grande vitesse.
3.Indicateurs électriques
Paramètres |
JSV57 |
|||
Min |
Valeur typique |
Max |
Unité |
|
Courant de sortie continu |
0 |
- |
6 |
Une |
Tension d'alimentation d'entrée |
24 |
36 |
48 |
VDC |
Courant d'entrée logique |
7 |
10 |
16 |
le nombre de |
Tension d'entrée logique |
5 |
5 |
24 |
V. Le groupe |
Fréquence d'impulsion |
0 |
- |
200 |
kHz |
Résistance à l'isolation |
100 |
|
|
MΩ |
4.Spécifications électriques
Unité |
JSV57-09V36 |
JSV57-14V36 |
JSV57-18V36 |
|
Phases |
|
3 |
||
Pôles |
|
8 |
||
Tension |
|
36VDC |
||
Puissance nominale |
Le |
90 |
140 |
180 |
Couple nominal |
N.m. |
0.28 |
0.45 |
0.57 |
Couple maximal |
N.m. |
0.8 |
1.1 |
1.5 |
Vitesse nominale |
tr/min |
3000 |
3000 |
3000 |
Courant nominal |
Une |
3.3 |
5 |
6.6 |
5.Interface de pilotage et introduction du câblage
(1)Port d'entrée d'alimentation
Numéro du terminal |
Le symbole |
Nom |
Donnez un exemple |
1 |
+Vdc |
Terminal positif de la puissance en courant continu |
DC + 24V à 48V |
2 |
Le GND |
Correspondance de la terre |
0V |
(2) Port de signal de commande
Numéro du terminal |
Le symbole |
Nom |
Donnez un exemple |
1 |
PUL + |
Entrée d'impulsion + |
Compatible avec les signaux 5V~24V |
2 |
PUL - |
Entrée d'impulsion - |
|
3 |
DIR + |
Entrée de direction + |
|
4 |
DIR - |
Entrée de direction - |
|
5 |
ENA + |
Activer la saisie + |
|
6 |
ENA - |
Activer la saisie - |
|
7 |
PED + |
Sortie du signal de position + |
|
8 |
PED - |
Sortie du signal de position - |
|
9 |
ALM + |
Sortie de signal d'alarme + |
|
10 |
ALM - |
Sortie de signal d'alarme - |
(3) Port de communication RS232
Numéro du terminal |
Le symbole |
Nom |
Donnez un exemple |
1 |
NC |
|
|
2 |
RX |
Récepteur RS232 |
|
3 |
Le GND |
Terrain de puissance |
|
4 |
TX |
Transmetteur RS232 |
|
5 |
+5V |
Réservoir de puissance positive |
(Ceci n'a pas besoin d'être connecté) |
(4)Indication de l'état
PWR : Indicateur de puissance. L'indicateur vert s'allume lorsque la puissance est appliquée.
ALM : Indicateur de panne. En cas de panne, l'indicateur clignote en cycle de 5 secondes ; lorsque la panne est corrigée par l'utilisateur, le LED rouge reste toujours éteint. Le LED rouge clignote à une fréquence de 2Hz, où le LED est allumé pendant 200ms et éteint pendant 300ms. Le nombre de fois que le LED rouge clignote en 5 secondes représente des informations de panne différentes, et la relation spécifique est indiquée dans le tableau suivant :
Numéro de série |
Nombre de clignotements |
Description de la panne |
1 |
1 |
Défaut de surintensité |
2 |
2 |
Alarme d'erreur de position |
3 |
3 |
Défaut de l'encodeur |
4 |
4 |
Surcharge du moteur |
5 |
5 |
Tension excessive sur la ligne |
6 |
6 |
Tension insuffisante du bus |
6.Réglage de l'interrupteur DIP
7.Filtrage de la commande d'entrée
Lorsque l'interrupteur DIP S1 est réglé sur ON, la fonction de filtrage d'entrée est activée, et le temps de filtrage est configuré par le registre 2603 ; cette fonction est effective uniquement lorsque le moteur est déverrouillé ;
Le pilote JSV57 utilise un interrupteur DIP à six positions pour définir la précision de subdivision et la direction de rotation du moteur.
(1)Réglage de la direction
Direction |
S2 |
Sens horaire (CCW) |
Éteint |
CW |
Sur |
(2)Réglage de la micro-pas
Pouls/REV |
S3 |
S4 |
S5 - Le système de contrôle |
S6 |
Par défaut |
Sur |
Sur |
Sur |
Sur |
400 |
Sur |
Sur |
Sur |
Sur |
800 |
Éteint |
Sur |
Sur |
Sur |
1600 |
Sur |
Éteint |
Sur |
Sur |
3200 |
Éteint |
Éteint |
Sur |
Sur |
6400 |
Sur |
Sur |
Éteint |
Sur |
12800 |
Éteint |
Sur |
Éteint |
Sur |
25600 |
Sur |
Éteint |
Éteint |
Sur |
51200 |
Éteint |
Éteint |
Éteint |
Sur |
1000 |
Sur |
Sur |
Sur |
Éteint |
2000 |
Éteint |
Sur |
Sur |
Éteint |
4000 |
Sur |
Éteint |
Sur |
Éteint |
5000 |
Éteint |
Éteint |
Sur |
Éteint |
8000 |
Sur |
Sur |
Éteint |
Éteint |
10000 |
Éteint |
Sur |
Éteint |
Éteint |
20000 |
Sur |
Éteint |
Éteint |
Éteint |
40000 |
Éteint |
Éteint |
Éteint |
Éteint |
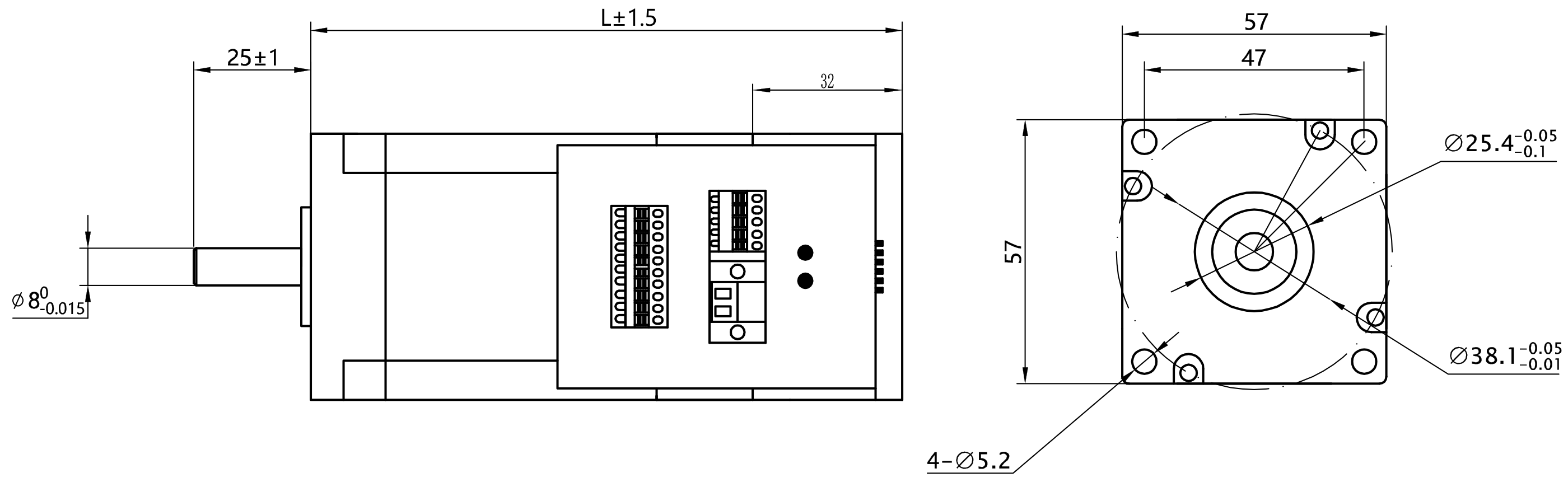
8.Dimensions du moteur (unité=mm)
Copyright © Changzhou Jinsanshi Mechatronics Co., Ltd. All rights reserved. - Politique de confidentialité



