

Əsas səhifə > Արտադրանք > Փակ շրջանաձեւ քայլակետեր Մոտորներ եւ վարորդներ > Փակ շրջանառության քայլակետի վարորդ

Մեր HSS758-ը հիբրիդային բարձր հզորության ստեպպերի սերվո վարորդ է: Այն տեղավորվում է NEMA 34 երկֆազ քայլային շարժիչին: Համեմատած ավանդական բաց հանգույցի ստեպպերի վարորդի հետ, այս ստեպպերի սերվո վարորդը կարող է լիովին խուսափել քայլային շարժիչի կորցրած քայլի խնդրից, բարձր արագության ոլորող մոմենտի նվազումը չափազանց ցածր է, քան բաց հանգույցի ստեպպերի դրայվերը, մեծապես մեծացնում է բարձր արագությամբ շարժիչի կատարումը և ոլորող մոմենտը: . Վարորդի հոսանքը կարող է ավտոմատ կերպով կառավարվել բեռի հիման վրա, այն արդյունավետորեն զսպում է շարժիչի ջերմաստիճանի բարձրացումը, երկարացնում է շարժիչի աշխատանքային կյանքը: Ներկառուցված դիրքը և տագնապի ազդանշանի ելքը հարմար են հյուրընկալող համակարգչի համար՝ վերահսկելու և վերահսկելու շարժիչի աշխատանքի վիճակը: Ավելի դիրքի սխալի ազդանշանի գործառույթը ապահովում է սարքավորումների անվտանգ աշխատանքը: Դա ավանդական բաց հանգույցի վարորդի իդեալական փոխարինումն ու արդիականացումն է, ինչպես նաև AC servo համակարգի մասնակի գործառույթներով, գինը կազմում է AC համակարգի միայն կեսը:
1.Գործառույթները
● 32-բիթանոց DSP և վեկտորային փակ հանգույցի կառավարման տեխնոլոգիա
● Առանց քայլ կորցնելու, բարձր ճշգրտություն դիրքում
● Բարելավել շարժիչի ելքային մոմենտը և աշխատանքային արագությունը
● Փոփոխական հոսանքի կառավարման տեխնոլոգիա, զսպում է շարժիչի ջերմաստիճանի բարձրացումը
● Հարմարվել մեխանիկական ծանրաբեռնվածության տարբեր պայմաններին (ներառյալ ցածր կոշտության ճախարակները), կարիք չկա կարգավորելու շահույթի պարամետրը
● Հարթ և հուսալի շարժում, ցածր թրթռում, արագացման և դանդաղեցման մեծ բարելավում
● Առանց թրթռումների զրոյական արագության ստատիկ հնարավորություն
● Հարմարեցվում է NEMA34 2-ֆազյա հիբրիդային սերվոմոտորին
● Առավելագույն քայլ-զարկերակային հաճախականություն 200KHZ
● Միկրո քայլ 400-65535 զարկերակ/շրջադարձ
● Լարման միջակայք AC50V~80V
● Հոսանքից, լարման և դիրքի գերազանցումից պաշտպանություն
● Վեց թվային խողովակային ցուցադրում, հեշտ է սահմանել պարամետրերը եւ վերահսկել շարժիչի աշխատանքային վիճակը
2. Էլեկտրական պարամետր
Մուտքային լարման | AC50V~80V (սովորաբար օգտագործվում է 75VAC) |
Ընթացիկ ելք | Պիկ 8.0A (ընթացիկ փոփոխական՝ հիմնված բեռի վրա) |
| 7-20 մԱ |
Հաճախականություն | 0~200KHz |
Հարմար շարժիչ | 2-ֆազյա nema 34 հիբրիդային փակ շրջանաձեւ քայլային շարժիչ |
Էկոդավորման լուծումը | 1000 |
Բացառման դիմադրություն | ≥500 ՄΩ |
3.Շրջակա միջավայրի պարամետր
Սառեցման եղանակ | Բնական սառեցում կամ հարկադիր օդի սառեցում |
Աշխատանքային միջավայր | Խուսափեք փոշուց, նավթի մառախուղից և քայքայիչ գազերից |
աշխատանքային ջերմաստիճան | 0~50°C |
Թթվածնային մակարդակ | 40~90% RH |
Վիբրացիա | 5.9m/s2Մաքսին |
Պահեստավորման միջավայր | -20℃~65℃ |
4.Power Interface Ports
Պորտ | Սիմվոլ | Տարածաշրջան | Նշում |
1 | AC | Շարժիչի հզորության մուտքային միացք | Սովորաբար օգտագործեք 75VAC |
2 | AC | ||
3 | A+ | Մոտորային մալուխներ (մոտորային մալուխները չեն կարող սխալ կապվել) | Կարմիր |
4 | Ա- | Կանաչ | |
5 | Բ+ | Դեղին |
5. Կառավարման ազդանշանի միջերեսային նավահանգիստներ
Պորտ | Սիմվոլ | Տարածաշրջան | Նշում |
3 | PUL+ | Զարկերակային ազդանշանի մուտքագրում + |
|
4 | PUL- | Զարկերակային ազդանշանի մուտքագրում - | |
5 | DIR+ | Ուղղության ազդանշանի մուտքագրում + | |
6 | DIR-ի | Ուղղության ազդանշանի մուտքագրում - | |
7 | ALM+ | Տագնապային ազդանշանի ելք + |
|
8 | ALM- | Տագնապային ազդանշանի ելք - | |
9 | PEND+ | Դիրքի ազդանշանի ելք + |
|
10 | ՊԵՆԴ- | Դիրքի ազդանշանի ելք - | |
11 | ENA+ | Միացնել ազդանշանի մուտքագրումը + |
|
12 | ԷՆԱ- | Միացնել ազդանշանի մուտքագրումը - | |
23 | OA+ | Encoder A Ելք | Կոդավորիչ A, B, Z ազդանշան դիֆերենցիալ շարժիչ (26LS31) ելք, ոչ մեկուսացված ելք։ Եթե շարժիչը միայն A,B երկու ալիքի կոդավորիչը, ապա անտեսեք Զ ալիք. |
24 | OA- | ||
25 | OB+ | Կոդավորիչ B Ելք | |
26 | ՕԲ- | ||
27 | OZ+ | Encoder Z ելք | |
28 | OZ- | ||
29 | CZ | Կոդավորիչ Z բաց կոլեկտորի ելք |
|
30 | ԳՆԴ | Գետնին |
6.Encoder Signal Input Interface Ports
Պորտ | Սիմվոլ | Տարածաշրջան | Նշում |
1 | EA+ | Կոդավորիչ A+ Մուտք | Եթե շարժիչը միայն A,B երկու ալիքի կոդավորիչը, ապա անտեսեք Զ ալիք. |
11 | ԷԱ- | Encoder A- Մուտք | |
2 | EB+ | Կոդավորիչ B+ Մուտք | |
12 | EB- | Encoder B- Մուտք | |
7 | EZ+ | Encoder Z+ Մուտք | |
8 | EZ- | Encoder Z- Մուտք | |
13 | ՎCC | +5V |
|
3 | ԳՆԴ | Գետնին |
7.RS232 Կապի ինտերֆեյսի նավահանգիստներ
Պորտ | Սիմվոլ | Տարածաշրջան |
1 | NC | Միացված չէ |
2 | +5V | Արտաքին HISU-ի համար |
3 | TXD | RS232 փոխանցման նավահանգիստ |
4 | ԳՆԴ | Գետնին |
5 | RXD | RS232 ընդունման նավահանգիստ |
6 | NC | Միացված չէ |
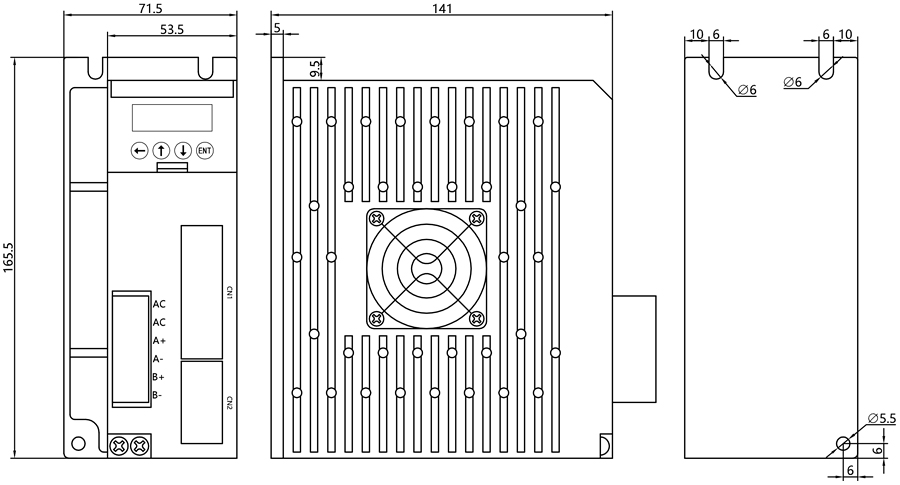
8. Ընդհանուր չափերը (միավոր = մմ)
Copyright © Changzhou Jinsanshi Mechatronics Co., Ltd. All rights reserved. - Գաղտնիության քաղաքականություն
 Տրամաբանական ընթացիկ մուտքագրում
Տրամաբանական ընթացիկ մուտքագրում


