

Halaman Utama > Produk > Pembalap dan pengemudi > Pengemudi stepper loop tertutup

CL57R kami adalah produk penggerak stepper loop tertutup berdasarkan RS485 Modbus yang mendukung protokol Modbus RTU. Produk ini mengintegrasikan fungsi pengontrol sumbu tunggal dan menggunakan protokol komunikasi bus Modbus RTU standar untuk kontrol. Produk ini dapat memasang maksimum 32 sumbu dan dapat mewujudkan kontrol sinkron bus multi-sumbu. Penggerak ini memiliki kontrol posisi, kontrol kecepatan, posisi internal 16 segmen dan kontrol kecepatan internal 16 segmen, dukungan untuk pengembalian nol, pemosisian absolut/relatif, JOG, dan fungsi lainnya, dapat dikontrol secara langsung menggunakan layar sentuh atau pengontrol dengan antarmuka RS485.
1.Fitur
● Mendukung protokol RTU Modbus standar pada bus RS485;
● Tidak ada kehilangan langkah, posisi yang akurat;
● Ukuran arus diatur secara cerdas sesuai beban untuk menyesuaikan diri dengan berbagai kondisi beban mekanik;
● Pengendalian filter akselerasi, decelerasi dan pelembab terintegrasi untuk operasi yang lebih lancar;
● Segmen yang ditentukan pengguna;
● Mendukung posisi, kecepatan, nol kembali, JOG, posisi multi-tahap, kecepatan multi-tahap dan mode lainnya;
● 7 port input, 3 fungsi port output semuanya dapat diprogram dan dikonfigurasi;
● rentang tegangan: DC + 24V ~ 48V;
● Dengan perlindungan arus, tegangan, toleransi posisi dan perlindungan lainnya;
2.Aplikasi Khas
Cocok untuk berbagai peralatan dan instrumen otomatisasi kecil dan menengah, seperti robot industri, mesin tekstil, mesin jahit industri khusus, mesin striping kawat, mesin penandaan, mesin pemotong, laser phototypesetting, plotters, alat mesin CNC, mesin ukiran, peralatan perakitan otomatis, dll. Efek aplikasi sangat baik di peralatan di mana pengguna mengharapkan kebisingan rendah
3.Indikator listrik
Sumber Daya | DC24~48V, catu daya yang direkomendasikan DC36V |
Arus Output | Puncak 6.0A (arus berubah dengan beban) |
Arus masukan DI | Daya 10~50mA |
Tegangan masukan DI | +24VDC |
jenis komunikasi | RS485 |
Tingkat komunikasi maksimum | 115200bps |
4.Parameter Lingkungan
Metode pendinginan | Pendingin alami atau radiator eksternal | |
Lingkungan penggunaan | Gunakan kesempatan | Cobalah untuk menghindari debu, minyak dan gas korosif |
Suhu | 0~40℃ | |
Kelembaban | 40 ~ 90% RH | |
Getaran | 5,9m/s2Max | |
Suhu penyimpanan | -20°C~80°C | |
5.Port masukan daya
Nomor terminal | Simbol | Nama | Menjelaskan |
1 | +Vdc | Terminal positif pasokan listrik DC | DC + 24V ~ 48V Sumber daya DC + 36V yang direkomendasikan |
2 | GND | Daya DC tanah |
6. Pelabuhan motor
Pin | Simbol | Deskripsi |
1 | A+ | Motor fase berliku + |
2 | Aku... | Motor fase berliku- |
3 | B+ | Motor fase B berliku + |
4 | B- | Gulungan motor fase B - |
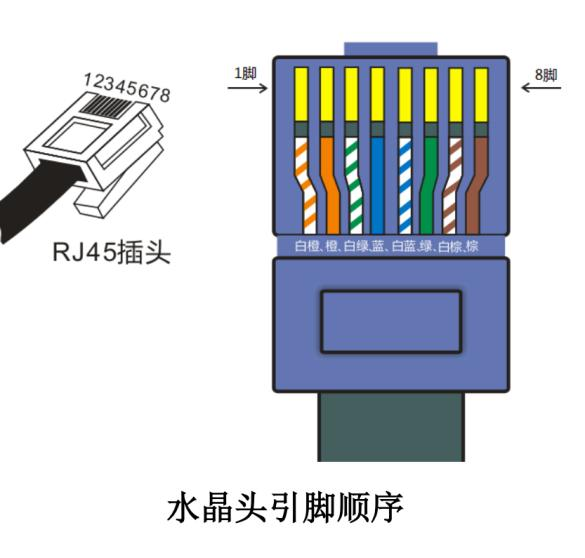
7.Port komunikasi RS485
Pin | Definisi sinyal | Warna kabel jaringan |
1 | RS485+ | putih dan oranye |
2 | RS485- | mengatur |
3 | nC | putih dan hijau |
4 | nC | biru |
5 | GND | putih dan biru |
6 | GND | hijau |
7 | nC | putih dan coklat |
8 | nC | Coklat |
8.Pelabuhan encoder
Pin | definisi | Menjelaskan |
1 | TAMENG | Pelindung encoder |
2 | nC | RS485- |
3 | nC |
|
4 | nC |
|
5 | EVCC | Terminal positif catu daya encoder |
6 | EGND | Terminal negatif catu daya encoder |
7 | nC |
|
8 | nC |
|
9 | Bahasa Indonesia: EB+ |
|
10 | EB- |
|
11 | Bahasa Indonesia: EA+ |
|
12 | EA- |
|
9.Pelabuhan DI/DO
Nomor terminal | Definisi simbol | Menjelaskan |
1 | DI0 | Port input ujung tunggal: tegangan kerja yang valid 24V |
2 | DI1 | |
3 | DI2 | |
4 | DI3 | |
5 | DI4 | |
6 | DI5 | |
7 | DI6 | |
8 | DIKOM | Port input common port: kompatibel dengan metode sambungan anode dan katode umum |
9 | Lakukan0 | Port keluaran ujung tunggal |
10 | DO1 | |
11 | DO2 | |
12 | Bahasa Indonesia: DOCOM | Port output port umum: kutub negatif dari catu daya |
10. Indikasi status
PWR: Indikator Daya. Saat daya menyala, lampu indikator hijau selalu menyala.
Indikator kesalahan. Lampu merah berkedip sekali dalam 3 detik, atas kesalahan arus atau phase-to-phase short circuit; Lampu merah berkedip 2 kali terus menerus dalam 3 detik, atas kesalahan tegangan; Lampu merah berkedip 7 kali terus menerus dalam 3 detik, kesalahan posisi melebihi alarm toleransi.
11.Pengaturan sakelar DIP
CL57R menggunakan switch DIP 5 digit untuk mengatur nomor stasiun pengemudi dan switch DIP 2 digit untuk mengatur laju baud komunikasi.
SW1~SW5: pengaturan nomor stasiun pengemudi. SW6~SW7: kecepatan baud komunikasi pengemudi. Nomor stasiun budak dan kecepatan komunikasi baud harus dihidupkan kembali untuk berlaku setelah dimodifikasi.
Nomor stasiun budak | SW1 | SW2 | SW3 | SW4 | SW5 |
Bawaan | PADA | PADA | PADA | PADA | PADA |
1 | MATI | PADA | PADA | PADA | PADA |
2 | PADA | MATI | PADA | PADA | PADA |
3 | MATI | MATI | PADA | PADA | PADA |
4 | PADA | PADA | MATI | PADA | PADA |
5 | MATI | PADA | MATI | PADA | PADA |
6 | PADA | MATI | MATI | PADA | PADA |
7 | MATI | MATI | MATI | PADA | PADA |
8 | PADA | PADA | PADA | MATI | PADA |
9 | MATI | PADA | PADA | MATI | PADA |
10 | PADA | MATI | PADA | MATI | PADA |
11 | MATI | MATI | PADA | MATI | PADA |
12 | PADA | PADA | MATI | MATI | PADA |
13 | MATI | PADA | MATI | MATI | PADA |
14 | PADA | MATI | MATI | MATI | PADA |
15 | MATI | MATI | MATI | MATI | PADA |
16 | PADA | PADA | PADA | PADA | MATI |
17 | MATI | PADA | PADA | PADA | MATI |
18 | PADA | MATI | PADA | PADA | MATI |
19 | MATI | MATI | PADA | PADA | MATI |
20 | PADA | PADA | MATI | PADA | MATI |
21 | MATI | PADA | MATI | PADA | MATI |
22 | PADA | MATI | MATI | PADA | MATI |
23 | MATI | MATI | MATI | PADA | MATI |
24 | PADA | PADA | PADA | MATI | MATI |
25 | MATI | PADA | PADA | MATI | MATI |
26 | PADA | MATI | PADA | MATI | MATI |
27 | MATI | MATI | PADA | MATI | MATI |
28 | PADA | PADA | MATI | MATI | MATI |
29 | MATI | PADA | MATI | MATI | MATI |
30 | PADA | MATI | MATI | MATI | MATI |
31 | MATI | MATI | MATI | MATI | MATI |
Catatan: Saat mengatur nomor stasiun slave dalam berkas default, Anda dapat menentukan nomor stasiun slave dengan mengatur register nomor stasiun slave driver kustom (0x0020), yang berkisar dari 1 hingga 31.
Kecepatan baud komunikasi | SW6 | SW7 |
9600 | PADA | PADA |
19200 | MATI | PADA |
38400 | PADA | MATI |
115200 | MATI | MATI |
Catatan: Ketika laju baud komunikasi ditetapkan menjadi 9600bp s, format data port serial ditetapkan menjadi 8 bit data, tidak ada paritas, dan 1 bit stop. Ketika diatur ke tiga tingkat baud lainnya, format data port serial ditentukan oleh register format data port serial (0x0021).
SW8: Resistor terminal RS485. Driver di ujung bus perlu menyetel sakelar DIP ini ke posisi ON, dan driver lainnya ke posisi OFF.
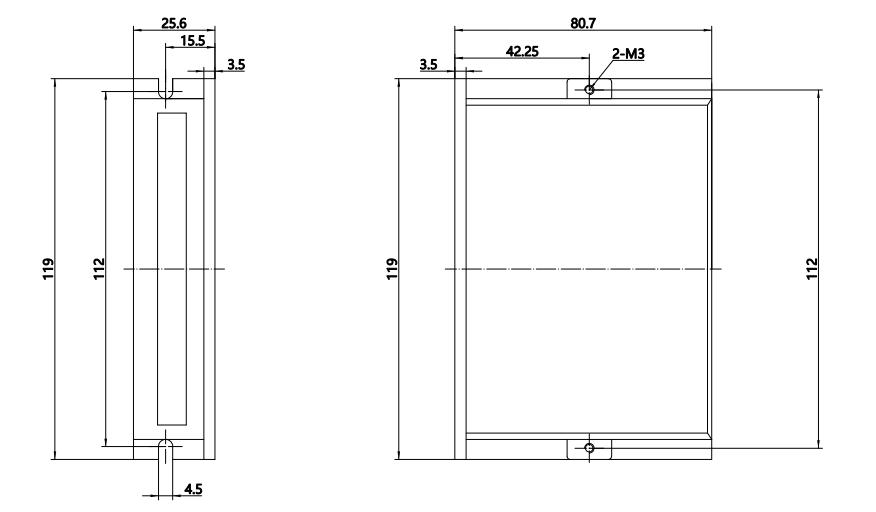
12. Dimensi Keseluruhan (satuan = mm)
Copyright © Changzhou Jinsanshi Mechatronics Co., Ltd. All rights reserved. - Kebijakan Privasi



