

Halaman Utama > Produk > Motor Stepper & Pengemudi > Pengemudi stepper

DM556D kami adalah pengemudi stepper digital berkinerja tinggi berdasarkan DSP dengan algoritma kontrol canggih. Motor langkah yang digerakkan oleh DM556D dapat berjalan dengan kebisingan yang jauh lebih kecil dan getaran yang jauh lebih sedikit daripada driver lain di pasar. Pengemudi stepper DM556D memiliki fitur kebisingan yang lebih rendah, getaran yang lebih rendah, dan pemanasan yang lebih rendah. Tegangannya adalah DC24V-50V. Ini cocok untuk semua motor stepper hibrida 2-fase yang arusnya kurang dari 5,6A. Ada 16 jenis langkah mikro DM556D. Jumlah langkah maksimum DM556D adalah 51200 langkah/rev (mikrostep adalah 1/256). Jangkauan arusnya adalah 2.1A-5.6A, dan arus keluaran memiliki 8 stall. DM556D memiliki fungsi semi-aliran otomatis, over-voltage, under-voltage dan over-current protection. Pengemudi stepper DM556D kami dapat diterapkan dalam berbagai peralatan dan instrumen otomatisasi skala kecil, seperti mesin pelabelan, mesin pemotong, mesin pengemasan, mesin menggambar, mesin ukiran, mesin CNC dan sebagainya.
1.Fitur:
● Penerapan teknologi subdivisi gelombang sinus murni DSP 32-bit
● Kebisingan rendah, getaran rendah, dan suhu rendah naik
● Tegangan 24-50VDC
● Dengan pengaturan arus output 8 stall, arus puncak 5.6A
● Dengan 16 gerai pengaturan subdivisi mikro langkah
● Perlindungan setengah arus otomatis, uji diri, overvoltage, undervoltage, over current
● Isolasi optik internal, respon frekuensi tertinggi 200KHZ.
● Cocok untuk rentang arus 2.1-5.6A motor stepper 2-fase, 4-fase nema 23, motor stepper nema 34
2.Pilihan Resolusi Mikrostep
Pulsa/Rev | SW5 | SW6 | SW7 | SW8 |
Bawaan | PADA | PADA | PADA | PADA |
800 | MATI | PADA | PADA | PADA |
1600 | PADA | MATI | PADA | PADA |
3200 | MATI | MATI | PADA | PADA |
6400 | PADA | PADA | MATI | PADA |
12800 | MATI | PADA | MATI | PADA |
25600 | PADA | MATI | MATI | PADA |
51200 | MATI | MATI | MATI | PADA |
1000 | PADA | PADA | PADA | MATI |
2000 | MATI | PADA | PADA | MATI |
4000 | PADA | MATI | PADA | MATI |
5000 | MATI | MATI | PADA | MATI |
8000 | PADA | PADA | MATI | MATI |
10000 | MATI | PADA | MATI | MATI |
20000 | PADA | MATI | MATI | MATI |
40000 | MATI | MATI | MATI | MATI |
Default: Pulsa dapat disesuaikan sesuai dengan kebutuhan pelanggan.
3.Pengaturan saat ini
Puncak | RMS | SW1 | SW2 | SW3 |
Bawaan | MATI | MATI | MATI | |
2,1A | 1.5A | PADA | MATI | MATI |
2,7A | 1,9A | MATI | PADA | MATI |
3.2A | 2.3A | PADA | PADA | MATI |
3,8A | 2,7A | MATI | MATI | PADA |
4,3A | 3,1A | PADA | MATI | PADA |
4,9A | 3.5a | MATI | PADA | PADA |
5,6A | 4.0A | PADA | PADA | PADA |
Pengguna dapat mengatur fungsi setengah aliran pengemudi stepper dengan SW4. "OFF" menunjukkan arus henti diatur menjadi setengah dari arus dinamis, "ON" menunjukkan arus henti dan arus dinamis adalah sama. Pengguna dapat mengatur SW4 ke "OFF", untuk mengurangi pemanas motor dan driver dan meningkatkan keandalan.
4.Deskripsi antarmuka
Sinyal | Fungsi | Instruksi Operasi |
Alarm/PWR | Lampu Indikator | Ada dua lampu indikator. Indikator daya hijau. Ketika stepper driver power on, lampu hijau akan selalu menyala. Indikator kesalahan berwarna merah, ketika ada kesalahan over-voltage atau over-current, lampu merah akan selalu menyala; setelah kesalahan pengemudi dibersihkan, jika daya kembali lampu merah akan mati. |
PUL+/PUL- | Antarmuka Sinyal | PUL+ dan PUL- adalah sisi positif dan negatif dari sinyal pulsa kontrol; DIR+ dan DIR- adalah sisi positif dan negatif dari sinyal arah; ENA+ dan ENA- adalah sisi positif dan negatif dari sinyal aktif. |
DIR+/DIR- | ||
ENA+/ENA- | ||
GND | Antarmuka Daya | Driver stepper menggunakan catu daya DC. Tegangan operasi yang direkomendasikan adalah 24VDC-50VDC, dan konsumsi daya harus lebih besar dari 100W. |
+Vdc | ||
A+ | Antarmuka Motor | A+ dan A- terhubung ke penggulung fase motor; B+ dan B terhubung ke penggulung fase lain motor. Jika Anda perlu mundur, salah satu dari fase penggulung dapat dibalik. |
Aku... | ||
B+ | ||
B- |
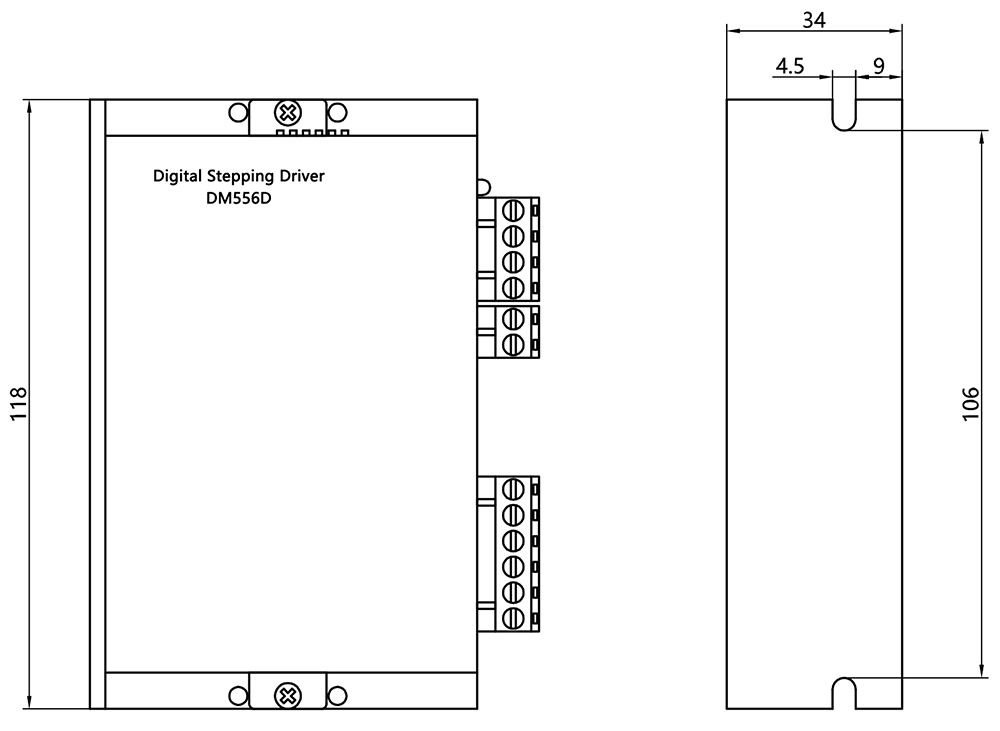
5.Dimension Umum
Copyright © Changzhou Jinsanshi Mechatronics Co., Ltd. All rights reserved. - Kebijakan Privasi



