

Halaman Utama > Produk > Servo motor stepper terintegrasi > RS485 Servo Motor Stepper Terintegrasi

JSS57R kami adalah servo motor hibrida terintegrasi berdasarkan bus RS485 yang mendukung protokol Modbus RTU. Produk ini mengintegrasikan servo motor hibrida dan driver, dan menggunakan protokol komunikasi bus Modbus RTU standar untuk kontrol. Dibandingkan dengan kombinasi tradisional pengemudi motor stepper dan motor stepper, kinerja biaya lebih tinggi. Produk servo hibrida terintegrasi ini mengintegrasikan keuntungan kontrol komunikasi bus, kabel sederhana, tidak ada langkah yang hilang, kenaikan suhu rendah, kebisingan rendah, kecepatan tinggi, torsi tinggi, dan biaya rendah. Ini adalah produk kontrol gerak yang sangat hemat biaya.
1.Fitur
2.Spesifikasi listrik
Model NO. |
Sudut langkah |
Panjang Motor |
Arus /Phase |
Hambatan /Phase |
Induktansi /Phase |
Torsi tahan |
(°) |
(L) mm |
A |
ω |
mH |
N.M |
|
JSS57R1.5N |
1.8 |
56 |
4.2 |
0.4
|
1.2 |
1.2 |
JSS57R2N |
1.8 |
76 |
4.2 |
0.5 |
1.8 |
2 |
JSS57R3N |
1.8 |
112 |
4 |
0.9 |
4.0 |
3 |
3.Indikator listrik
Pasokan daya |
DC24~48V, catu daya yang direkomendasikan DC36V |
Arus Keluaran |
Puncak 6.0A (arus bervariasi dengan beban) |
Arus input logika |
7 ~ 16mA, 10mA direkomendasikan |
Jenis komunikasi |
RS485 |
tingkat komunikasi maksimum |
115200bps |
Pasokan daya |
DC24~48V, catu daya yang direkomendasikan DC36V |
5.Lingkungan dan parameter penggunaan
Metode Pendinginan |
Pendingin alami atau radiator eksternal |
|
Lingkungan penggunaan |
Gunakan kesempatan |
Hindari debu, minyak dan gas korosif sebanyak mungkin |
Suhu |
0~40℃ |
|
Kelembaban |
40 ~ 90% RH |
|
Getaran |
5,9m/s2Max |
|
Suhu penyimpanan |
-20°C~80°C |
|
6.Definifikasi antarmuka
(1)Port masukan daya
Nomor terminal |
Simbol |
Nama |
Menjelaskan |
1 |
+Vdc |
Terminal positif daya DC |
DC + 24V ~ 48V Sumber daya DC + 36V yang direkomendasikan |
2 |
GND |
Daya DC tanah |
(2) Pelabuhan sinyal kontrol
Nomor terminal |
Simbol |
Nama |
Menjelaskan |
1 |
CCW+ |
Batas positif positif |
Dukungan +5V~+24V |
2 |
CCW- |
Batas positif negatif |
|
3 |
HOME+ |
Asal mekaniknya positif. |
|
4 |
Rumah... |
Asal mekanik negatif |
|
5 |
CW+ |
Batas negatif positif |
|
6 |
CW- |
Batas negatif negatif |
|
7 |
PEND+ |
Output sinyal positif dalam posisi |
|
8 |
Tunggu... |
Output sinyal negatif dalam posisi |
|
9 |
ALM+ |
Sinyal alarm keluar |
|
10 |
ALM- |
Output sinyal alarm negatif |
(3) RS485 port komunikasi
Nomor terminal |
Simbol |
Nama |
1 |
RS485+ |
Antarmuka komunikasi RS485 |
2 |
RS485- |
|
3 |
RS485+ |
|
4 |
RS485- |
|
5 |
GND |
|
(4)Penyataan status
PWR: Indikator daya. Saat dihidupkan, lampu indikator hijau selalu menyala.
Indikator kesalahan. Lampu merah berkedip sekali dalam waktu 3 detik: kesalahan over-current atau phase-to-phase short circuit; re times lampu berkedip 2 kali secara terus menerus dalam waktu 3 detik: kesalahan over-voltage;
Lampu merah berkedip 7 kali secara terus menerus dalam waktu 3 detik: kesalahan posisi berada di luar toleransi alarm.
7.Pengaturan saklar DIP
JSS57R menggunakan switch DIP 6 bit untuk mengatur nomor stasiun drive dan kecepatan baud komunikasi.
SW1 ~ SW4: Pengaturan nomor stasiun drive. SW5 ~ SW6: Kecepatan komunikasi baud drive. Setelah nomor stasiun budak dan laju baud komunikasi dimodifikasi, itu perlu dinyalakan lagi untuk berlaku.
Jumlah budak |
SW1 |
SW2 |
SW3 |
SW4 |
bawaan |
PADA |
PADA |
PADA |
PADA |
1 |
MATI |
PADA |
PADA |
PADA |
2 |
PADA |
MATI |
PADA |
PADA |
3 |
MATI |
MATI |
PADA |
PADA |
4 |
PADA |
PADA |
MATI |
PADA |
5 |
MATI |
PADA |
MATI |
PADA |
6 |
PADA |
MATI |
MATI |
PADA |
7 |
MATI |
MATI |
MATI |
PADA |
8 |
PADA |
PADA |
PADA |
MATI |
9 |
MATI |
PADA |
PADA |
MATI |
10 |
PADA |
MATI |
PADA |
MATI |
11 |
MATI |
MATI |
PADA |
MATI |
12 |
PADA |
PADA |
MATI |
MATI |
13 |
MATI |
PADA |
MATI |
MATI |
14 |
PADA |
MATI |
MATI |
MATI |
15 |
MATI |
MATI |
MATI |
MATI |
Catatan: Pengaturan nomor stasiun budak, ketika berada di file default, dapat mendefinisikan nomor stasiun budak dengan mengatur register nomor stasiun budak drive khusus (0x0020), kisaran adalah 1 ~ 31.
Kecepatan baud komunikasi |
SW5 |
SW6 |
9600 |
PADA |
PADA |
19200 |
MATI |
PADA |
38400 |
PADA |
MATI |
115200 |
MATI |
MATI |
Catatan: Ketika laju baud komunikasi ditetapkan menjadi 9600bps, format data serial ditetapkan menjadi 8 bit data, tidak ada paritas, dan 1 bit stop. Ketika diatur ke tiga tingkat baud lainnya, format data port serial ditentukan oleh register format data port serial (0x0021).
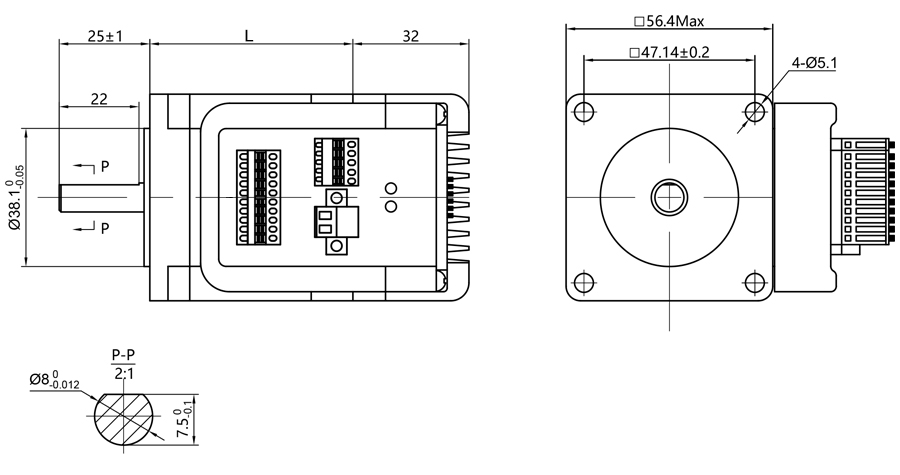
(8)Dimension Umum
Copyright © Changzhou Jinsanshi Mechatronics Co., Ltd. All rights reserved. - Kebijakan Privasi



