Halaman Utama > Produk > Motor Stepper & Pengemudi > Pengemudi stepper

STD3722 kami adalah driver motor digital stepper berdasarkan kontrol DSP. Motor langkah yang digerakkan oleh STD3722 dapat berjalan dengan kebisingan yang jauh lebih kecil dan getaran yang jauh lebih sedikit daripada driver lain di pasar. Dan akurasi penentuan posisi bisa mencapai 60.000 langkah/revolusi. Pengemudi stepper ini banyak digunakan dalam peralatan CNC berukuran besar dan menengah dengan resolusi tinggi seperti mesin ukiran, alat mesin CNC berukuran menengah, mesin sulaman komputer, dan mesin kemasan.
1.Fitur
● Driver stepper digital 3 fase, adopsi teknologi DSP 32-bit
● Kebisingan rendah, getaran rendah, dan suhu rendah naik
● Tegangan 110v~220VAC
● Dengan pengaturan arus keluaran 8 tahap, arus puncak 7.0A
● Dengan pengaturan subdivisi mikrostep 16 tahap, resolusi tertinggi 60000 langkah / putaran
● Perlindungan setengah arus otomatis, uji diri, overvoltage, undervoltage, over current
● Isolasi optik internal, frekuensi respons tertinggi hingga 200Kpps
● Cocok untuk motor stepper 3-fase nem42, motor stepper nema 52 antara 1.2-7.0A
● Ketika pulsa langkah berhenti lebih dari 100ms, arus koil secara otomatis dikurangi menjadi setengah dari arus yang ditetapkan, secara efektif mengurangi panas motor
● Tegangan sinyal : 5V ~ 24V kompatibel
● Suhu kerja: -30 ℃~ 85 ℃
2.Pilihan Resolusi Mikrostep
Pulsa/Rev | D1 | D2 | D3 | d4 |
400 | PADA | PADA | PADA | PADA |
500 | PADA | PADA | PADA | MATI |
600 | PADA | PADA | MATI | PADA |
800 | PADA | PADA | MATI | MATI |
1000 | PADA | MATI | PADA | PADA |
1200 | PADA | MATI | PADA | MATI |
2000 | PADA | MATI | MATI | PADA |
3000 | PADA | MATI | MATI | MATI |
4000 | MATI | PADA | PADA | PADA |
5000 | MATI | PADA | PADA | MATI |
6000 | MATI | PADA | MATI | PADA |
10000 | MATI | PADA | MATI | MATI |
12000 | MATI | MATI | PADA | PADA |
20000 | MATI | MATI | PADA | MATI |
30000 | MATI | MATI | MATI | PADA |
60000 | MATI | MATI | MATI | MATI |
3.Pengaturan saat ini
arus | D1 | D2 | D3 | d4 |
1.2A | MATI | MATI | MATI | MATI |
1.5A | MATI | MATI | MATI | PADA |
2.0A | MATI | MATI | PADA | MATI |
2.3A | MATI | MATI | PADA | PADA |
2.5a | MATI | PADA | MATI | MATI |
3.0A | MATI | PADA | MATI | PADA |
3.2A | MATI | PADA | PADA | MATI |
3.6A | MATI | PADA | PADA | PADA |
D5: ON, pulsa ganda: PU adalah sinyal pulsa langkah maju, DR adalah sinyal pulsa langkah mundur; OFF, pulsa tunggal: PU adalah sinyal pulsa langkah, DR adalah sinyal kontrol arah
D6: saklar deteksi otomatis (PENGETAP saat menerima pulsa eksternal, ON drive dengan kecepatan internal 30 r / min)
4.Port sinyal (DB15) Deskripsi
Definisi port | Nomor PIN | Simbol | Fitur | Anotasi |
RS-232 | 1 | RX | Menerima data | Terhubung ke port TX pengontrol (fungsi disimpan) |
2 | TX | Kirim data | Terhubung ke port RX pengontrol (fungsi disimpan) | |
8 | GND | Garis dasar | Terhubung ke kawat tanah port pengontrol (fungsi disimpan) | |
DB15 | 1 | PU+ | Positif terminal sinyal pulsa masukan | menghubungkan catu daya sinyal, +5V ~ +24V dapat didorong |
2 | PU- | DP5=OFF, PU adalah sinyal pulsa langkah | Kecilnya yang jatuh itu benar. Ketika denyut nadi pergi dari tinggi ke rendah, motor mengambil langkah, dan resistor batas arus internal 220Ω membutuhkan: tingkat rendah 0 ~ 0.5V, tingkat tinggi 24V atau kurang, lebar denyut nadi > 2.5μS | |
DP5=ON, PU adalah sinyal pulsa langkah fase positif | ||||
3 | DR+ | Terminal positif sinyal arah masukan | hubungkan sumber daya sinyal, + 5V~ +24V dapat dijalankan | |
4 | DR- | DP5=OFF, DR adalah sinyal pulsa arah | Digunakan untuk mengubah arah motor. Persyaratan: level rendah 0-0.5V, level tinggi 24V atau kurang, lebar pulsa >2.5μS | |
DP5=ON, DR adalah sinyal pulsa terbalik | ||||
5 |
MF+ | Terminal positif sinyal pelepasan motor (sinyal enable) | menghubungkan catu daya sinyal, +5V ~ +24V dapat didorong | |
6 |
MF- | Terminal negatif sinyal pelepasan motor (sinyal enable) | Ketika motor mati dan driver berhenti bekerja, motor berada dalam keadaan bebas | |
7 | nC |
| tidak sah | |
8 | nC |
| tidak sah | |
9 | ALM+ | Sinyal output kesalahan terminal positif | Alarm over current, over heating | |
10 | ALM- | Terminal negatif sinyal kesalahan keluaran |
| |
11 | RDY+ | Sinyal output siap terminal positif | Tunjukkan bahwa pengemudi siap bekerja | |
12 | RDY- | Sinyal output siap terminal negatif |
| |
13, 14, 15 | nC |
| tidak sah | |
Motor, sisi pasokan daya | 1,2 | L,N | Sumber Daya | 110v ~ 220v |
3 | PE | Garis dasar | Bumi (pembungkus drive terintegrasi) | |
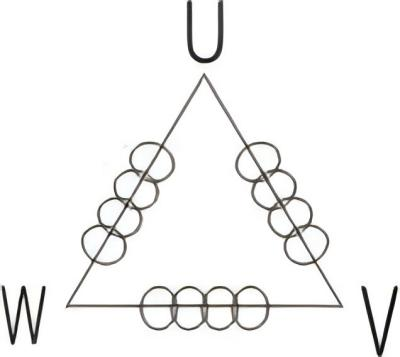
4 | U | Jalur motor |
| |
5 | V | |||
6 | W |
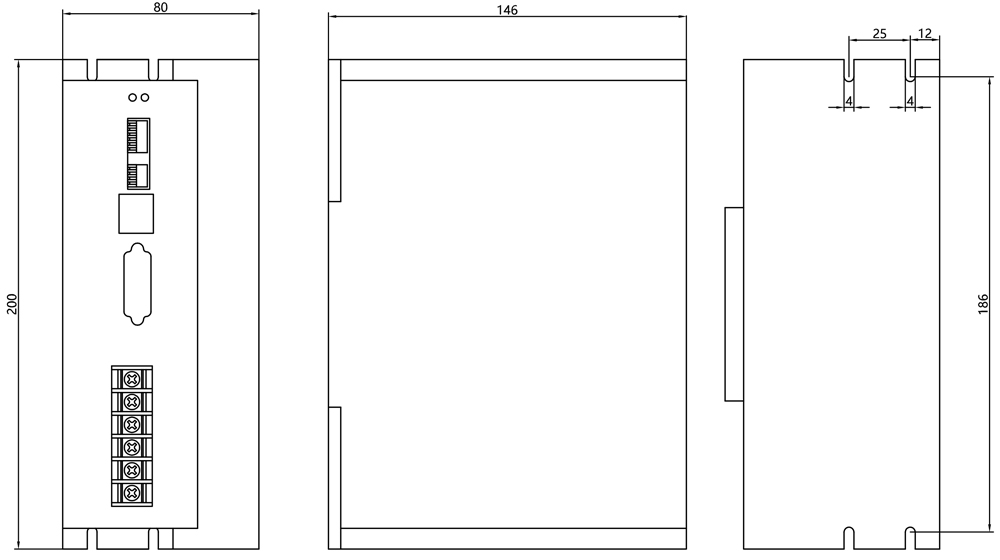
5.Dimension Umum
Copyright © Changzhou Jinsanshi Mechatronics Co., Ltd. All rights reserved. - Kebijakan Privasi