JSV57 integrated servo motor is a 57mm frame size brushless DC motor integrated with a 16-bit encoder and a servo drive. This DC servo motor adopts 32-bit ARM chip and optimized control algorithm technology, with excellent design and compact size. The integrated design of driver and motor not only saves the connection between driver and motor, but also effectively reduces the electromagnetic interference between the connection. It adopts better anti-vibration and low heat generation technology, effectively solving the problems of heat generation and noise.
1.Features
2.Typical application
Suitable for various small and medium automation equipment and instruments, such as inkjet printer, small and medium-sized engraving machines, electronic processing equipment, automatic gripping equipment, special CNC machine tools, packaging equipment, etc. It is particularly effective in equipment where users expect low noise and high speed.
3.Electrical Indicators
Parameters |
JSV57 |
|||
Min |
Typical Value |
Max |
Unit |
|
Continuous output current |
0 |
- |
6 |
A |
Input power supply voltage |
24 |
36 |
48 |
Vdc |
Logic input current |
7 |
10 |
16 |
mA |
Logic input voltage |
5 |
5 |
24 |
V |
Pulse frequency |
0 |
- |
200 |
kHz |
Insulation resistance |
100 |
|
|
MΩ |
4.Electrical Specification
Unit |
JSV57-09V36 |
JSV57-14V36 |
JSV57-18V36 |
|
Phases |
|
3 |
||
Poles |
|
8 |
||
Voltage |
|
36VDC |
||
Rated power |
W |
90 |
140 |
180 |
Rated torque |
N.M |
0.28 |
0.45 |
0.57 |
Peak torque |
N.M |
0.8 |
1.1 |
1.5 |
Rated speed |
rpm |
3000 |
3000 |
3000 |
Rated current |
A |
3.3 |
5 |
6.6 |
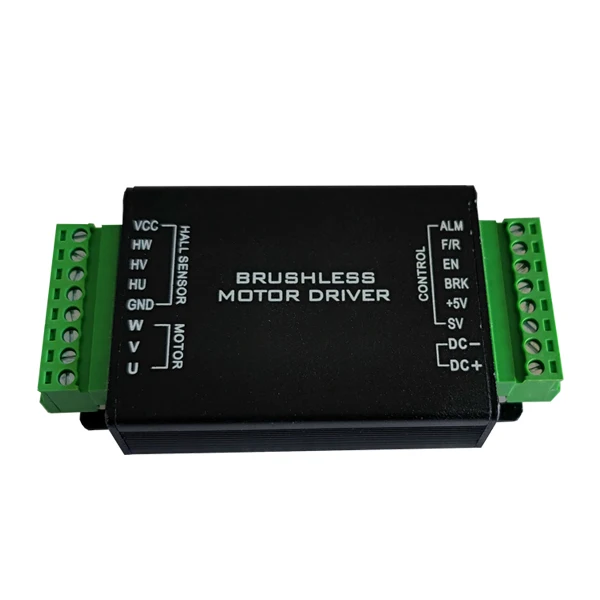
5.Drive interface and wiring introduction
(1)Power input port
Terminal Number |
Symbol |
Name |
Illustrate |
1 |
+VDC |
DC power positive terminal |
DC+24V~48V |
2 |
GND |
DC power ground |
0V |
(2)Control Signal Port
Terminal Number |
Symbol |
Name |
Illustrate |
1 |
PUL + |
Pulse Input + |
Compatible with 5V~24V signals |
2 |
PUL - |
Pulse Input - |
|
3 |
DIR + |
Direction Input + |
|
4 |
DIR - |
Direction Input - |
|
5 |
ENA + |
Enable Input + |
|
6 |
ENA - |
Enable Input - |
|
7 |
PED + |
Position Signal Output + |
|
8 |
PED - |
Position Signal Output - |
|
9 |
ALM + |
Alarm Signal Output + |
|
10 |
ALM - |
Alarm Signal Output - |
(3)RS232 communication port
Terminal Number |
Symbol |
Name |
Illustrate |
1 |
NC |
|
|
2 |
RX |
RS232 receiver |
|
3 |
GND |
Power ground |
|
4 |
TX |
RS232 sender |
|
5 |
+5V |
Positive power terminal |
(This does not need to be connected) |
(4)Status indication
PWR:Power Indicator. The green indicator lights when power is applied.
ALM:Fault indicator. When a fault occurs, the indicator flashes in a 5 seconds cycle; when the fault is cleared by the user, the red LED is always off. The red LED flashes at a frequency of 2Hz, where the LED is on for 200ms and off for 300ms. The number of times the red LED flashes in 5 seconds represents different fault information, and the specific relationship is shown in the following table:
Serial number |
Number of flashes |
Fault Description |
1 |
1 |
Over-current fault |
2 |
2 |
Position error tolerance alarm |
3 |
3 |
Encoder fault |
4 |
4 |
Motor overload |
5 |
5 |
Bus over-voltage |
6 |
6 |
Bus under-voltage |
6.DIP switch setting
7.Input command filtering
When the DIP switch S1 is set to ON, the input filter function is enabled, and the filter time is configured by register 2603; this function is effective only when the motor is unlocked;
The JSV57 driver uses a six-position DIP switch to set the subdivision accuracy and motor rotation direction.
(1)Direction Setting
Direction |
S2 |
CCW |
OFF |
CW |
ON |
(2)Microstep setting
Pulse/rev |
S3 |
S4 |
S5 |
S6 |
Default |
ON |
ON |
ON |
ON |
400 |
ON |
ON |
ON |
ON |
800 |
OFF |
ON |
ON |
ON |
1600 |
ON |
OFF |
ON |
ON |
3200 |
OFF |
OFF |
ON |
ON |
6400 |
ON |
ON |
OFF |
ON |
12800 |
OFF |
ON |
OFF |
ON |
25600 |
ON |
OFF |
OFF |
ON |
51200 |
OFF |
OFF |
OFF |
ON |
1000 |
ON |
ON |
ON |
OFF |
2000 |
OFF |
ON |
ON |
OFF |
4000 |
ON |
OFF |
ON |
OFF |
5000 |
OFF |
OFF |
ON |
OFF |
8000 |
ON |
ON |
OFF |
OFF |
10000 |
OFF |
ON |
OFF |
OFF |
20000 |
ON |
OFF |
OFF |
OFF |
40000 |
OFF |
OFF |
OFF |
OFF |
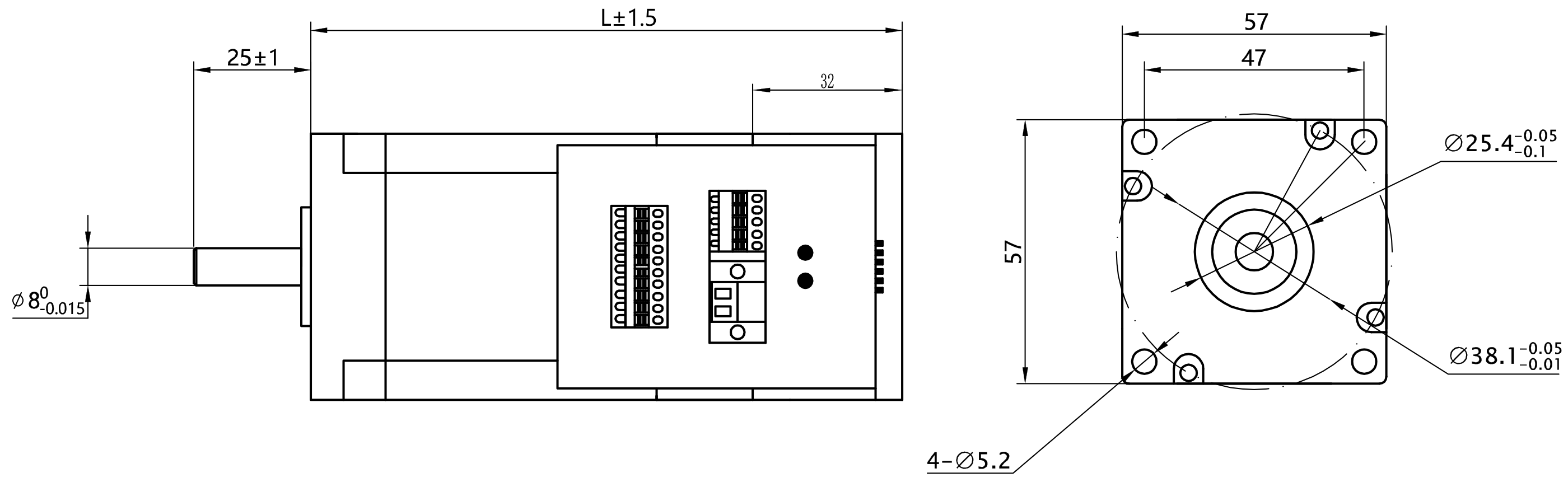
8.Motor Dimensions(unit=mm)
9.Certificate
We have passed the ISO-9001 quality certification system and obtained a number of application patents. Our products have international certifications such as CE and ROHS.

10.Review

Copyright © 2026 Changzhou Jinsanshi Mechatronics Co., Ltd. All rights reserved. - Privacy policy