

홈페이지 > 제품 > 스테퍼 모터 및 드라이버 > 스테퍼 모터

우리의 네마 8 스테퍼 모터는 작은 3D 프린터, 로봇 팔, 드론, 컨베이어, 그리고 좁은 공간에서 높은 정밀도를 요구하는 다른 소형화된 시스템에서 널리 사용되는 스테퍼 모터입니다. 그 플랜지 크기는 20mm * 20mm이며 1.8도 단계 각도와 함께 2 단계 설계를 사용합니다. 이 유형의 스테퍼 모터는 컴팩트 구조, 가벼운 무게, 높은 효율성 및 낮은 소음의 특징을 가지고 있으며 엄격한 공간 요구 사항이있는 응용 프로그램에 적합합니다. 성능 측면에서, 우리의 nema 8 스테퍼 모터는 잘 수행, 그들의 정적 토크는 상대적으로 높습니다, 일반적으로 최대 300g.cm. 또한 nema 8 스테퍼 모터는 출력 샤프트 유형, 커넥터, 브레이크, 인코더 및 기어박스 등 다양한 사용자 정의 옵션을 제공합니다. 사용자는 실제 필요에 따라 유연하게 선택할 수 있습니다.
1.일반적 사양
항목 |
제품 사양 |
발걸음 각도 |
1.8° |
온도 상승 |
80°Cmax |
발걸음 각의 정확성 |
±5% (전 단계, 부하 없이) |
주변 온도 |
-20℃~+50℃ |
절연 저항 |
100MΩ,500VDC |
유전 강도 |
500VAC 1분 동안 |
셰프트 방사선 재생 |
0.02마크스 (450g-하중) |
셰프트 축 플레이 |
0.08마크스 (450g-하중) |
맥스 방사력 |
20N (플랜지에서 20mm) |
맥스 축력 |
2N |
단열계급 |
B급 |
2.전기 사양
모델 번호 |
발걸음 각도 |
모터 길이가 |
전류 /Phase |
저항 /Phase |
인덕턴스 /Phase |
유지 모터 |
# 리드 |
로터 관성 |
무게 |
(°) |
(L) mm |
A |
ω |
mH |
g.cm |
아니요. |
g.cm |
g |
|
20HS28-0204 |
1.8 |
28 |
0.2 |
23 |
8.2 |
140 |
4 |
2.5 |
50 |
20HS30-0604 |
1.8 |
30 |
0.6 |
6.5 |
1.7 |
180 |
4 |
2.8 |
60 |
20HS33-0604 |
1.8 |
33 |
0.6 |
4.5 |
1.6 |
180 |
4 |
3.2 |
70 |
20HS38-0604 |
1.8 |
38 |
0.6 |
10 |
5.5 |
260 |
4 |
3.6 |
80 |
20HS42-0804 |
1.8 |
42 |
0.8 |
1.5 |
5.4 |
300 |
4 |
4 |
90 |
이 스테퍼 모터는 사용자 정의 요청으로 설계 및 제조 될 수 있습니다. 필요한 것을 찾을 수 없거나 구체적인 질문이 있다면, 저희에게 연락하는 것을 주저하지 마십시오. 우리는 여러분의 독특한 요구사항에 맞는 완벽한 스테이퍼 모터 솔루션을 찾는 데 도움을 줄 것입니다.
3.전체적인 차원
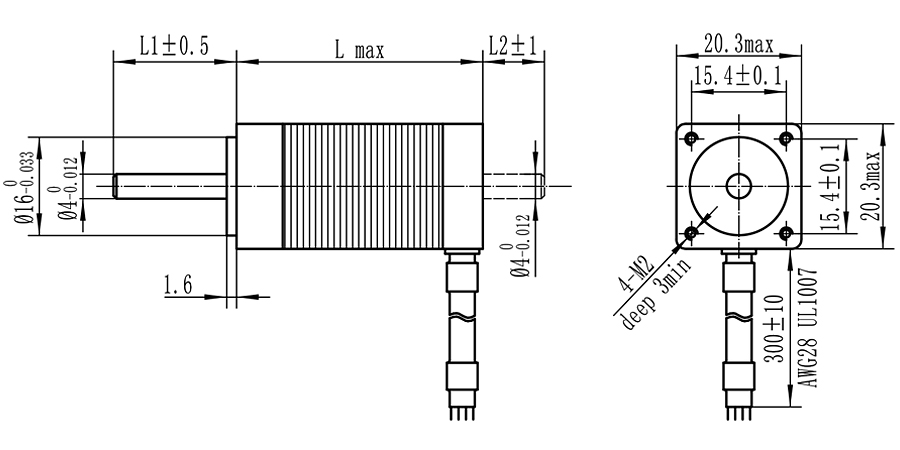
L1과 L2는 고객의 요구에 따라 사용자 정의 할 수 있습니다.
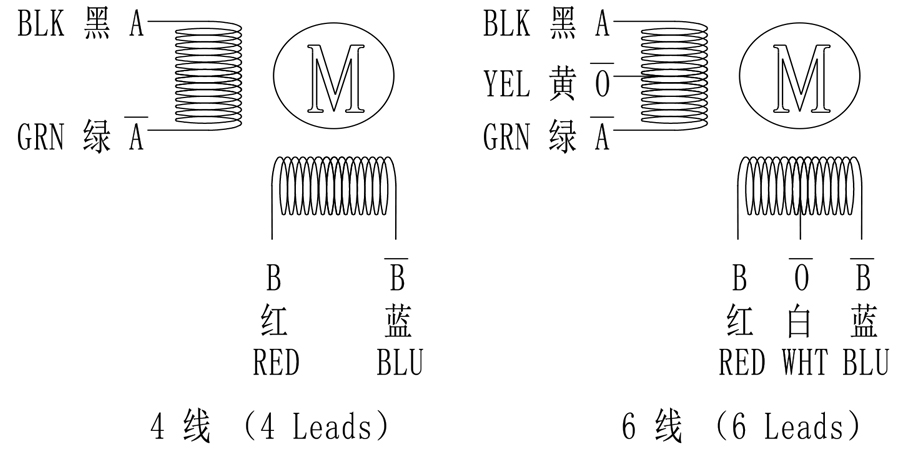
4. 와이어링 다이어그램
Copyright © Changzhou Jinsanshi Mechatronics Co., Ltd. All rights reserved. - 개인정보 보호정책



