


당사의 3HSS2260은 하이브리드 고전력 스테퍼 서보 드라이브입니다. NEMA 34 및 NEMA 42 3상 스테퍼 모터에 적합합니다. 기존의 오픈 루프 스테퍼 드라이버와 비교했을 때, 이 스테퍼 서보 드라이버는 스테퍼 모터의 로스트 스텝 문제를 완전히 피할 수 있으며, 고속 토크 감소는 오픈 루프 스테퍼 드라이버보다 극히 낮아 고속 모터의 성능과 토크를 크게 향상시킵니다. 드라이버 전류는 부하에 따라 자동으로 제어될 수 있으며, 모터의 온도 상승을 효과적으로 억제하고 모터 작동 수명을 연장합니다. 내장된 위치 및 알람 신호 출력은 호스트 컴퓨터가 모터 작동 상태를 모니터링하고 제어하는 데 편리합니다. 과위치 오류 알람 기능은 장비가 안전하게 작동하도록 보장합니다. 기존의 오픈 루프 드라이버를 대체하고 업그레이드하는 데 이상적이며, AC 서보 시스템의 일부 기능도 갖추고 있어 가격은 AC 시스템의 절반에 불과합니다.
1.특성
● 32비트 DSP 및 벡터 클로즈드 루프 제어 기술
● 스텝 손실 없이 위치 정확도 높음
● 모터 출력 토크 및 작업 속도 향상
● 가변 전류 제어 기술로 모터 온도 상승 억제
● 다양한 기계 하중 조건에 적응(저강성 풀리 포함), 아니오
이득 매개변수를 조정해야 합니다
● 부드럽고 안정적인 움직임, 낮은 진동, 가속 및 감속이 크게 향상되었습니다.
● 진동없이 정지속도를 0으로 유지하는 능력
● 3상 NEMA34 및 NEMA 42 하이브리드 서보 모터에 적응
● 최대 스텝펄스 주파수 200KHZ
● 마이크로 스텝 400-60000 펄스/회전
● 전압 범위 AC150-240V
● 과전류, 과전압, 과위치 보호
● 여섯 개의 디지털 튜브 디스플레이, 매개변수를 설정하고 모터 작동 상태를 모니터링하기 쉬움
2.전기적 매개변수
입력 전압 | AC150~240V (일반적으로 220VAC 사용) |
전류 출력 | 최대 6.0A(부하에 따른 전류 가변) |
논리 전류 입력 | 7~20mA |
주파수 | 0~200KHz |
적합한 모터 | 3상 NEMA 34 및 NEMA 42 하이브리드 서보 모터 |
인코더 해상도 | 1000 |
절연 저항 | ≥500MΩ |
3. 환경 매개변수
냉각 방법 | 자연 냉각 또는 강제 공기 냉각 |
작업 환경 | 먼지, 오일 안개 및 부식성 가스를 피하십시오. |
작동 온도 | 0~50℃ |
습도 | 40~90%RH |
진동 | 5.9m/s2 최대 |
보관 온도 | -20℃~65℃ |
3. 전원 인터페이스 포트 1
항구 | 상징 | 정의 | 비고 |
1 | L | 모터 전원 커넥터를 220AC에 연결 |
|
2 | N |
| |
3 | nC | 연결되지 않음 |
|
4 | BR | 제동 저항기 | Br과 P+ 사이에 연결된 외부 제동 저항 |
5 | 피+ | DC 버스 전압 |
4. 전원 인터페이스 포트 2
항구 | 상징 | 정의 | 네마34 | 네마42 |
1 | U | 모터 연결 포트 U | 빨간색 | 검정 |
2 | V | 모터 연결 포트 V | 검정 | 갈색 |
3 | W | 모터 연결 포트 W | 파란색 | 파란색 |
4 | PE | 접지 | Yellow | Yellow |
5 | L | 컨트롤러 전원 220VAC에 연결 | 범위 AC150-220V | |
6 | N | |||
5. 제어 신호 인터페이스 포트
항구 | 상징 | 정의 | 비고 |
3 | PUL+ | 펄스 신호 입력 + |
|
4 | PUL- | 펄스 신호 입력 - | |
5 | DIR+ | 방향 신호 입력 + | |
6 | DIR- | 방향 신호 입력 - | |
7 | ALM+ | 알람 신호 출력 + |
|
8 | ALM- | 알람 신호 출력 - | |
9 | PEND+ | 위치 신호 출력 + |
|
10 | 보류- | 위치 신호 출력 - | |
11 | ENA+ | 신호 입력 활성화 + |
|
12 | ENA | 신호 입력 활성화 - | |
23 | 오에이+ | 인코더 A 출력 | 인코더 A,B,Z 신호 차동 구동 장치(26LS31) 출력, 비분리 출력. 만약 모터는 A,B 두 개만 있어요 채널 인코더, 그런 다음 Z를 무시합니다. 채널. |
24 | 오에이- | ||
25 | 오비+ | 인코더 B 출력 | |
26 | 산부인과- | ||
27 | 오즈+ | 인코더 Z 출력 | |
28 | 온스- | ||
29 | 체코 | 인코더 Z 오픈 콜렉터 출력 |
|
30 | GND | 접지 |
|
6. 인코더 신호 입력 인터페이스 포트
항구 | 상징 | 정의 | 비고 |
1 | EA+ | 인코더 A+ 입력 | 모터에 A,B 2채널 인코더만 있는 경우 Z는 무시하세요. 채널. |
11 | EA- | 인코더 A- 입력 | |
2 | 이비+ | 인코더 B+ 입력 | |
12 | 이비- | 인코더 B- 입력 | |
7 | 이지+ | 인코더 Z+ 입력 | |
8 | 이지- | 인코더 Z- 입력 | |
13 | VCC | +5V |
|
3 | GND | 접지 |
7. RS232 통신 인터페이스 포트
항구 | 상징 | 정의 |
1 | nC | 연결되지 않음 |
2 | +5V | 외부 HISU용 |
3 | TXD | RS232 전송 포트 |
4 | GND | 접지 |
5 | RXD | RS232 수신 포트 |
6 | nC | 연결되지 않음 |
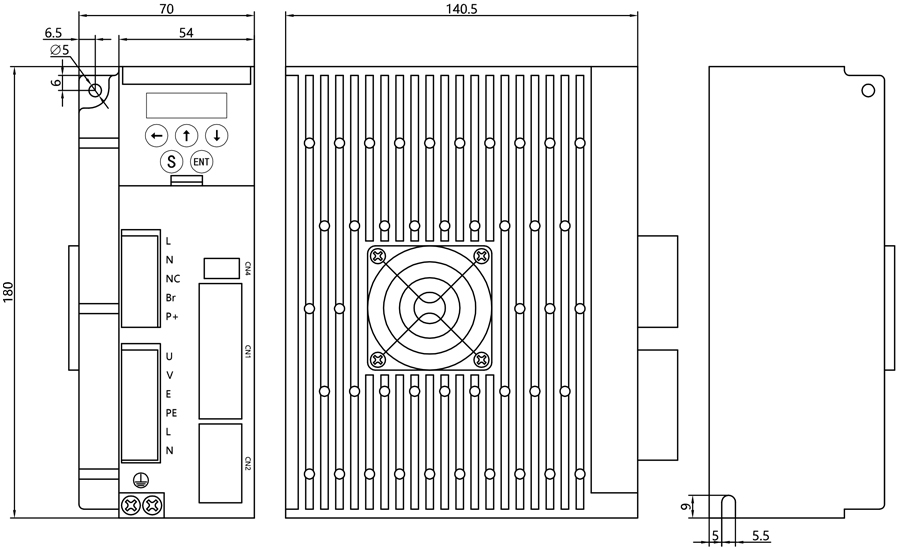
8.전체 치수(단위=mm)
Copyright © Changzhou Jinsanshi Mechatronics Co., Ltd. All rights reserved. - 개인정보 보호정책



