

homepage > Products > Clausa loop Steppers Motors & Coegi > Clausa loop Stepper Coegi

Nostrum 3HSS2260 est hybrid alta potentia stepper servo coegi. NEMA 34 et NEMA 42 gradus tres-gradus motoriis convenit. Comparatur ad traditum open-loop stepper agitator, stepper iste servo agitator potest omnino vitare quaestionem motoris passi amissi, celeritas magna torques diminutio est perquam minor quam ape- rus stepper agitator, multum augere effectus et torques celeritatis motoris. . Auriga vena latae oneris subnixa moderari potest, ita efficaciter temperatura motoris ortum coercere, vitam operantem extendere motorem. Constructum-in positione et terrore signum output apta sunt ad computatrum exercitum ad monitorem et statum currens motorem moderandum. Munus super positionis terrorem erroris tuto operandi apparatum obtinent. Est specimen repositum et upgrade traditionis ansa rectoris aperti, et est etiam cum parte functionum AC servo systematis, pretium dimidium tantum systematis AC.
1.Features
● 32-bit DSP et vector clausi-loop imperium technology
Sine amisso gradu, accurate in positione
Amplio motor output Aureus et opus velocitate
Variabilis vena technologiae moderatrix, motor temperatus oritur cohibe
● Adapta ad varietatem condicionum oneris mechanici (inclusis pulleys parvis rigiditatis), non
opus ad adjust in quaestum parametri
lenis et certa movens, humilis vibratio, magna emendatio in accelerato et retardata
Facultas nulla celeritas stabilis sine tremore
● Adapta ad motor servum hybridum NEMA34 et NEMA 42 3-phasium
Maximum gradum pulsus frequentiam 200KHZ
● Micro gradus 400-60000 pulsus/rev
● Ambitus voltage AC150-240V
Plus current, super intentione et in praesidio positus
● Sex tubi digitales ostentationis, facile ad parametra constituenda et statum motricis monitorandum
2.Electrical Parameter
Voltage input | AC150~240V (Usus typice 220VAC) |
Current output | Apicem 6.0A (variabilis vena secundum onus) |
Logica Current Input | 7~20mA |
Frequency | 0~200KHz |
Idoneum motor | 3-phasium nema 34 et nema 42 motor servum hybridum |
Encoder Resolution | 1000 |
Resistens Insulationis | ≥500MΩ |
Parameter 3.Environment
Modus refrigerationis | Naturalis refrigeratio vel coactus aer refrigerationem |
Ambitus operativus | Fuge pulverem, nebulam et oleum gasses mordax |
Temperatura operativa | 0~50℃ |
humiditas | 40~90% RH |
Vibratio | 5.9m/s²Max |
Temperatura recondita | -20℃~65℃ |
3.Power mollis Ports1
Portus | Symbolum | Definition | Animadverte |
1 | l | Motor potentia Connector ad 220AC |
|
2 | N |
| |
3 | NC | Non Iunctus |
|
4 | BR | Braking Resistor | Resistor freni externus coniunctus inter Br et P+ |
5 | P+ | Voltage DC Bus |
4.Power Interface Ports2
Portus | Symbolum | Definition | NEMA34 | NEMA42 |
1 | U | Motor Connection Portus U | Ruber | niger |
2 | v | Motor Connection Port V | niger | Brunneus |
3 | w | Motor Connection Portus W | Caeruleus | Caeruleus |
4 | PE | Humus | Flavus | Flavus |
5 | l | Imperium Iungo ad 220VAC | Range AC150-220V | |
6 | N | |||
5.Control signum mollis portuum
Portus | Symbolum | Definition | Animadverte |
3 | PUL+ | Pulsus signum potenti + |
|
4 | PUL- | Pulsus signum potenti - | |
5 | DIR+ | Directio signum Input + | |
6 | DIR- | Directionem signum potenti - | |
7 | ALM+ | Terrorem signum output + |
|
8 | ALM- | Terrorem signum output - | |
9 | PEND+ | Position signum output + |
|
10 | PEND- | Position signum output - | |
11 | ENA+ | Admitte signum potenti + |
|
12 | ENA- | Admitte signum potenti - | |
23 | OA+ | Encoder A output | Encoder A,B,Z Signum differentialis coegi (26LS31) output, non-semotus output. Si * motricium solum A, B duo channel encoder, tunc ignorare Z * alveum. |
24 | OA- | ||
25 | OB+ | Encoder B Output | |
26 | OB- | ||
27 | OZ+ | Encoder Z Output | |
28 | OZ- | ||
29 | CZ | Encoder Z aperta collector output |
|
30 | GND | Humus |
|
6.Encoder signum potenti mollis portuum
Portus | Symbolum | Definition | Animadverte |
1 | EA+ | Encoder A + Input | Si motor tantum cum A, B duobus alveis encoder, tunc ignorare Z alveum. |
11 | EA- | Encoder A- Input | |
2 | EB+ | Encoder B+ Input | |
12 | EB- | Encoder B- Input | |
7 | EZ+ | Encoder Z+ Input | |
8 | EZ- | Encoder Z- Input | |
13 | VCC | +5V |
|
3 | GND | Humus |
7.RS232 Communicatio interface Portuum
Portus | Symbolum | Definition |
1 | NC | Non Iunctus |
2 | +5V | Nam externi HISU |
3 | TxD | RS232 Transmission Port |
4 | GND | Humus |
5 | RxD | RS232 accepto Portus |
6 | NC | Non Iunctus |
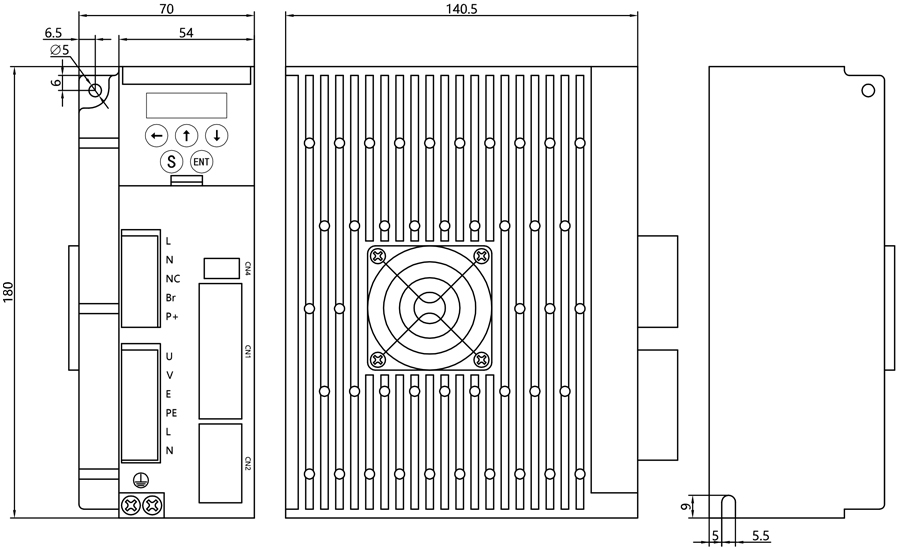
8.Overall Dimensiones (unitas = mm)
Copyright © Changzhou Jinsanshi Mechatronics Co., Ltd. All rights reserved. - Privacy Policy



