


Noster DM422 summus est effectus digitalis agitator stepper innixus in DSP cum algorithmo provecta potestate. Motores stepper a DM422 acti cum multo minore strepitu et multo minore vibratione currere possunt quam ceteri aurigae in foro. DM422 auriga stepper habet plumam sonitus inferioris, vibrationis inferioris, et calefactionis inferioris. Intentione aurigae gradatim DC 20V~40V est. Idoneum est omnibus 2 periodis hybridis steppris motoriis cujus vena minor est quam 2.2A. Maximus gradus numerus DM422 est 6400 gradus/rev (microstep is 1/32). Circulus currentis est 0.5A~2.2A. DM422 latae sententiae semi-fluxus, super-voltage, sub intentione et functione tutelae plus-currente habet. Nostra DM422 stepper agitator applicari potest in variis parvae magnitudinis automationis instrumentis et instrumentis, ut machina pterygia, machina secans, machina sarcina, machina delineatio, machina insculptio, machina CNC et cetera.
1.Features
● Adoptio technologiae subdivisionis 32-bit DSP, pura sinusoidalium
● Parvum sonitum, parvum vibrationem et parvum incrementum temperatus
● Voltage 20~40VDC
● Cum 8 stalla output current setting, peak current 2.2A
● Cum 4 stalla microstep subdivision setting
● Automatice dimidium current, sui test, super voltage, sub voltage, super current protectio
● Interna optica isolatio, maxima frequentia responsio 200KHZ.
● Aptum pro current 0.5~2.2A 2-phasium, 4-phasium hybrid stepper motor
2.Microstep Consilium Electio
Pulsus/REV | SW5 | SW6 |
Default | IN | IN |
1600 | OFF | IN |
3200 | IN | OFF |
6400 | OFF | OFF |
Default: pulsus nativus secundum requisita clientium potest esse.
3.Current Profecti
Peak | RMS | SW1 | SW2 | SW3 |
Default | IN | IN | IN | |
0.5A | 0.35A | OFF | IN | IN |
0.70A | 0.50A | IN | OFF | IN |
1.0A | 0.70A | OFF | OFF | IN |
1.30A | 0.90A | IN | IN | OFF |
1.60A | 1.20A | OFF | IN | OFF |
1.90A | 1.40A | IN | OFF | OFF |
2.20A | 1.60A | OFF | OFF | OFF |
Usores possunt constituere functionem dimidiae fluentiae ducis gradus per SW4. "OFF" indicat currentem quietum ad dimidium currentis dynamici constitutum esse. "ON" indicat currentem quietum et currentem dynamicum eadem esse. Usores debent constituere SW4 ad "OFF", ut calefactionem motoris et ducis minuere et fiduciam augere possint.
4.Interface descriptio
Signum | Functio | Descriptio |
PWR | luminum indicator | Indicator potentiae viridis est. Cum driver gradus potentiam accipit, lux viridis semper lucet. Indicator defectus ruber est, cum super-voltage vel super-current defectus est, lux rubra semper lucet; postquam defectus driver purgatur, si potentiam iterum accipias, lux rubra extinguetur. |
PUL | Signum Interfaces | PUL est input pulsus configurationis; DIR est input directionis motoris gradus; OPTO est copia potentiae pro portu signali + 5V; ENA est input liber motoris. |
DIR | ||
OPTO | ||
ENA | ||
GND | Potentia Interfaces | Dux gradus utitur fonte potentiae DC. Voltage operandi commendatum est 20VDC~40VDC, et consumptio potentiae maior esse debet quam 100W. |
+Vdc | ||
A+ | Motor Interfaces | A+ et A- coniunguntur ad unam spirae phasium motoris; B+ et B coniunguntur ad aliam spirae phasium motoris. Si retro ire debes, una ex spiris phasium reversa esse potest. |
A- | ||
B+ | ||
B- |
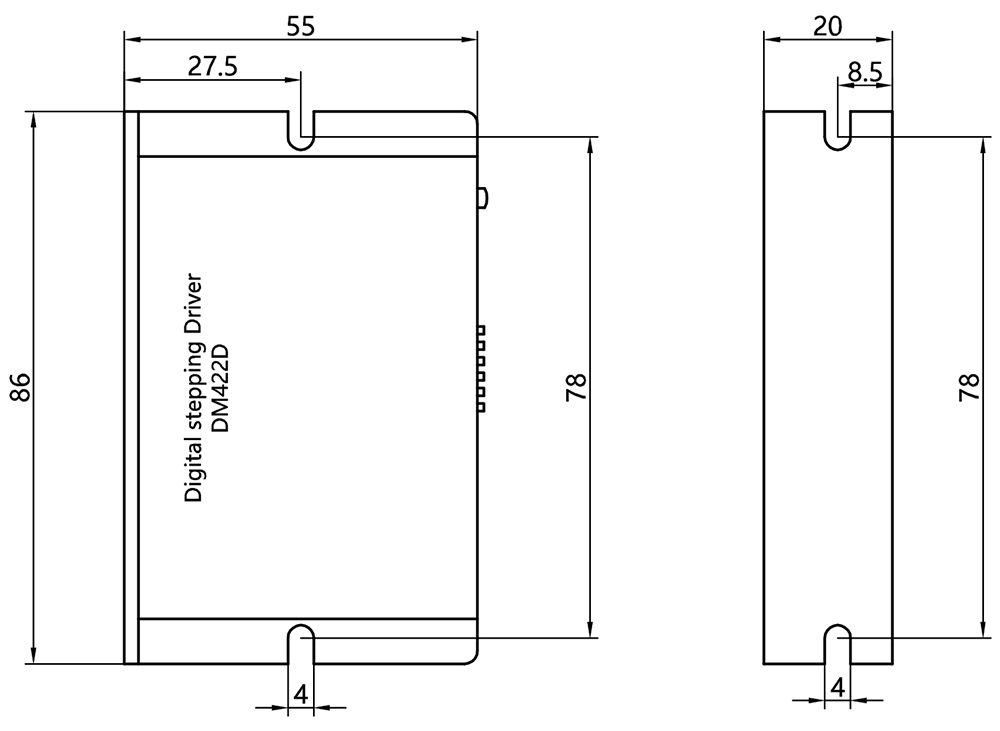
5.Overall Dimensiones
Copyright © Changzhou Jinsanshi Mechatronics Co., Ltd. All rights reserved. - Privacy Policy



