

Startpagina > Producten > Servosysteem > Geïntegreerde gelijkstroomservomotoren

De geïntegreerde servo-motor JSV57 is een brushless DC-motor met een framegrootte van 57mm, geïntegreerd met een 16-bits encoder en een servodrijver. Deze DC-servomotor maakt gebruik van een 32-bits ARM-chip en geoptimaliseerde controle-algoritme-technologie, met een uitstekende ontwerpinrichting en compacte afmetingen. De geïntegreerde ontwerp van drijver en motor bespaart niet alleen de verbinding tussen drijver en motor, maar vermindert ook effectief elektromagnetische storingen tussen de verbindingen. Het maakt gebruik van betere anti-trillings- en lage warmtewinst-technologieën, wat effectief de problemen van opwarming en geluid lost.
1. Kenmerken
2. Typische toepassing
Geschikt voor verschillende kleine en middelgrote automatiseringsapparaten en instrumenten, zoals een inkjetprinter, kleine en middelgrote graveermachines, elektronische verwerkingsapparatuur, automatische greppelapparatuur, speciale CNC-schuren, verpakkingstoestellen, enz. Het is vooral effectief in apparatuur waar gebruikers lage geluidsniveaus en hoge snelheid verwachten.
3.Elektrische indicatoren
Parameters |
JSV57 |
|||
Min. |
Typische waarde |
Maximaal |
Eenheid |
|
Continue uitgangsstroom |
0 |
- |
6 |
A |
Ingangsspanning |
24 |
36 |
48 |
VDC |
Logische invoerstroom |
7 |
10 |
16 |
mA |
Logica ingangsspanning |
5 |
5 |
24 |
V |
Pulsfrequentie |
0 |
- |
200 |
kHz |
Isolatieweerstand |
100 |
|
|
MΩ |
4.Elektrische specificaties
Eenheid |
JSV57-09V36 |
JSV57-14V36 |
JSV57-18V36 |
|
Fases |
|
3 |
||
Polen |
|
8 |
||
Spanning |
|
36vdc |
||
Geregistreerde vermogen |
W |
90 |
140 |
180 |
Genominale koppel |
N.m |
0.28 |
0.45 |
0.57 |
Maximale koppel |
N.m |
0.8 |
1.1 |
1.5 |
Nominaal Snelheid |
rpm |
3000 |
3000 |
3000 |
Gekwalificeerde Stroom |
A |
3.3 |
5 |
6.6 |
5.Drijfinterface en aansluiting introductie
(1)Stream-invoerpoort
Terminalnummer |
Symbool |
Naam |
Illustreren |
1 |
+Vdc |
Positieve terminale voor gelijkstroom |
DC+24V~48V |
2 |
GND |
Gelijkstroomkracht op de grond |
0V |
(2)Bestuurssignaalpoort
Terminalnummer |
Symbool |
Naam |
Illustreren |
1 |
PUL + |
Pulsingang + |
Compatibel met 5V~24V signalen |
2 |
PUL - |
Pulsingang - |
|
3 |
DIR + |
Richting invoer + |
|
4 |
DIR - |
Richting invoer - |
|
5 |
ENA + |
Invoer inschakelen + |
|
6 |
ENA - |
Invoer inschakelen - |
|
7 |
PED + |
Positie Signaal Uitgang + |
|
8 |
PED - |
Positie Signaal Uitgang - |
|
9 |
ALM + |
Alarmsignaal Uitgang + |
|
10 |
ALM - |
Alarmsignaal Uitgang - |
(3) RS232 communicatiepoort
Terminalnummer |
Symbool |
Naam |
Illustreren |
1 |
NC |
|
|
2 |
RX |
RS232-ontvanger |
|
3 |
GND |
Krachtgrond |
|
4 |
TX |
RS232-zender |
|
5 |
+5V |
Positieve krachtens |
(Dit hoeft niet verbonden te worden) |
(4)Status aanduiding
PWR: Voedingsschakelaar. De groene indicator licht op wanneer de voeding wordt aangesloten.
ALM: Foutindicator. Wanneer een fout optreedt, flitst de indicator in een cyclus van 5 seconden; wanneer de fout door de gebruiker is opgelost, is de rode LED altijd uit. De rode LED flitst met een frequentie van 2Hz, waarbij de LED 200ms aan is en 300ms uit. Het aantal keren dat de rode LED in 5 seconden flitst, staat voor verschillende foutinformatie, en de specifieke relatie wordt weergegeven in de volgende tabel:
Reeksnummer |
Aantal flitsen |
Foutbeschrijving |
1 |
1 |
Overstroomfout |
2 |
2 |
Positiefouttolerantiealarm |
3 |
3 |
Encoderfout |
4 |
4 |
Motoroverbelasting |
5 |
5 |
Busoverspanning |
6 |
6 |
Onderspanning van de bus |
6.Instelling van de DIP-schakelaar
7.Invoercommando filteren
Wanneer de DIP-schakelaar S1 ingesteld is op AAN, wordt de invoerfilterfunctie geactiveerd en wordt de filtertijd geconfigureerd door register 2603; deze functie is alleen actief wanneer de motor ontgrendeld is;
De JSV57-stuurder gebruikt een zespositie DIP-schakelaar om de subdeler nauwkeurigheid en de motorrichting in te stellen.
(1)Richting instellen
Richting |
S2 |
TmB (tegen de klok in) |
Afgeschakeld |
CW |
Aan |
(2)Microstep instelling
Puls/REV |
S3 |
S4 |
S5 |
S6 |
Standaard |
Aan |
Aan |
Aan |
Aan |
400 |
Aan |
Aan |
Aan |
Aan |
800 |
Afgeschakeld |
Aan |
Aan |
Aan |
1600 |
Aan |
Afgeschakeld |
Aan |
Aan |
3200 |
Afgeschakeld |
Afgeschakeld |
Aan |
Aan |
6400 |
Aan |
Aan |
Afgeschakeld |
Aan |
12800 |
Afgeschakeld |
Aan |
Afgeschakeld |
Aan |
25600 |
Aan |
Afgeschakeld |
Afgeschakeld |
Aan |
51200 |
Afgeschakeld |
Afgeschakeld |
Afgeschakeld |
Aan |
1000 |
Aan |
Aan |
Aan |
Afgeschakeld |
2000 |
Afgeschakeld |
Aan |
Aan |
Afgeschakeld |
4000 |
Aan |
Afgeschakeld |
Aan |
Afgeschakeld |
5000 |
Afgeschakeld |
Afgeschakeld |
Aan |
Afgeschakeld |
8000 |
Aan |
Aan |
Afgeschakeld |
Afgeschakeld |
10000 |
Afgeschakeld |
Aan |
Afgeschakeld |
Afgeschakeld |
20000 |
Aan |
Afgeschakeld |
Afgeschakeld |
Afgeschakeld |
40000 |
Afgeschakeld |
Afgeschakeld |
Afgeschakeld |
Afgeschakeld |
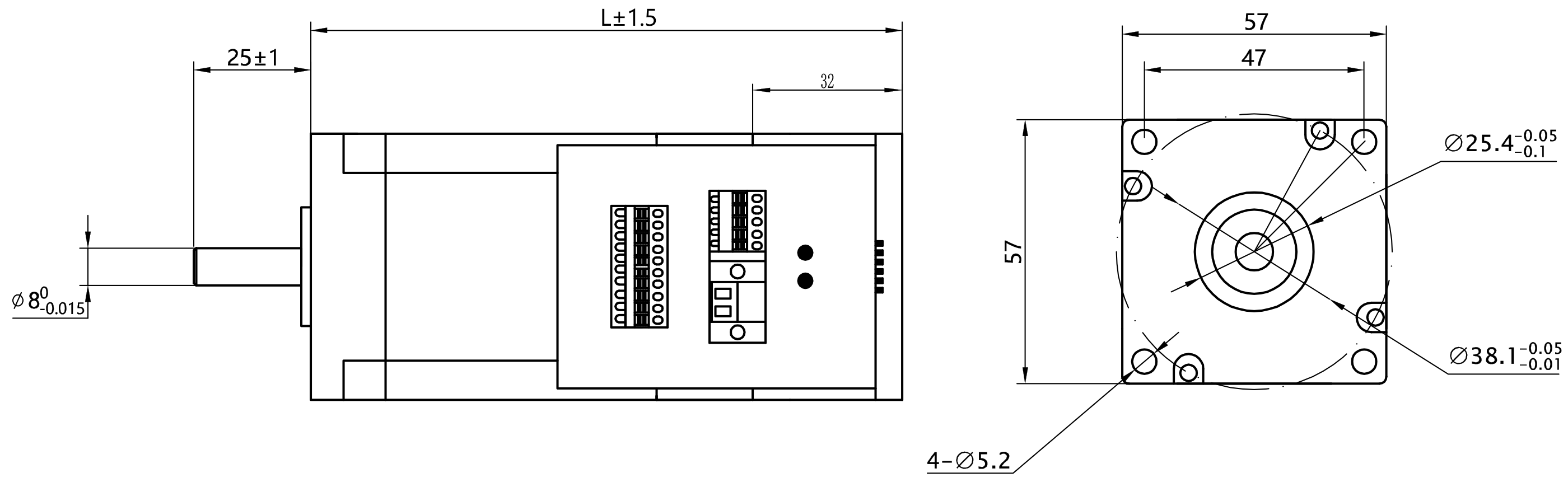
8.Motorafmetingen (eenheid=mm)
Copyright © Changzhou Jinsanshi Mechatronics Co., Ltd. All rights reserved. - Privacybeleid



