

Strona główna > Produkty > System serwo > Zintegrowane serwo silniki prądu stałego

Silnik serwowy zintegrowany JSV57 to silnik bezczynnikowy DC o rozmiarze ramy 57 mm, zintegrowany z koderykiem 16-bitowym i napędem serwowym. Ten silnik serwowy DC używa układu 32-bitowego ARM oraz zoptymalizowanej technologii algorytmów sterujących, charakteryzując się doskonałym projektem i kompaktowymi rozmiarami. Zintegrowane rozwiązanie kierownicy i silnika nie tylko oszczędza połączenia między kierownicą a silnikiem, ale również skutecznie redukuje elektromagnetyczne zakłócenia w połączeniach. Zastosowano lepszą technologię antywibracyjną i niskiej generacji ciepła, skutecznie rozwiązując problemy z grzewaniem się i hałasem.
1.Wyznaczenia
2. Typowe zastosowanie
Przydatne w różnych urządzeniach i przyrządach automatycznych małej i średniej klasy, takich jak drukarki jetowe, maszyny rytownicze małej i średniej klasy, urządzenia elektroniczne, automaty do chwytania, specjalistyczne maszyny CNC, pakowania itp. Jest szczególnie efektywne w zespołach, gdzie użytkownicy oczekują niskiego poziomu hałasu i wysokiej prędkości.
3.Wskaźniki elektryczne
Parametry |
JSV57 |
|||
Min |
Wartość typowa |
Max |
Jednostka |
|
Ciągły prąd wyjściowy |
0 |
- |
6 |
A. |
Napięcie zasilania wejściowego |
24 |
36 |
48 |
VDC |
Prąd wejściowy logiczny |
7 |
10 |
16 |
- Co? |
Napięcie wejścia logicznego |
5 |
5 |
24 |
V |
Częstotliwość pulsu |
0 |
- |
200 |
kHz |
Opór izolacji |
100 |
|
|
MΩ |
4.Specyfikacja elektryczna
Jednostka |
JSV57-09V36 |
JSV57-14V36 |
JSV57-18V36 |
|
Fazy |
|
3 |
||
Pola |
|
8 |
||
Napięcie |
|
36vdc |
||
Moc nominalna |
W |
90 |
140 |
180 |
Moment znamionowy |
N.M |
0.28 |
0.45 |
0.57 |
Maksymalny moment obrotowy |
N.M |
0.8 |
1.1 |
1.5 |
Prędkość nominalna |
obr/min |
3000 |
3000 |
3000 |
Prąd znamionowy |
A. |
3.3 |
5 |
6.6 |
5. Interfejs i wprowadzenie do przewodów napędowych
(1)Przejście wejściowe zasilania
Numer terminala |
Symbol |
Imię |
Zilustrować |
1 |
+Vdc |
Pozytywny końcowy zasilacz prądu stałego |
Prąd stały + 24V ~ 48V |
2 |
GND |
Ziemia zasilania prądem stałym |
0V |
(2) Port sygnału sterującego
Numer terminala |
Symbol |
Imię |
Zilustrować |
1 |
PUL + |
Wejście impulsowe + |
Zgodne z sygnałami 5V~24V |
2 |
PUL - |
Wejście impulsowe - |
|
3 |
DIR + |
Wprowadź kierunek + |
|
4 |
DIR - |
Wprowadź kierunek - |
|
5 |
ENA + |
Włącz wejście + |
|
6 |
ENA - |
Włącz wejście - |
|
7 |
PED + |
Wyjście sygnału położenia + |
|
8 |
PED - |
Wyjście sygnału położenia - |
|
9 |
ALM + |
Wyjście sygnału alarmowego + |
|
10 |
ALM - |
Wyjście sygnału alarmowego - |
(3) Port łączności RS232
Numer terminala |
Symbol |
Imię |
Zilustrować |
1 |
NC |
|
|
2 |
RX |
Odbiornik RS232 |
|
3 |
GND |
Ziemia silnikowa |
|
4 |
TX |
Nadawca RS232 |
|
5 |
+5V |
Pozytywny terminal zasilania |
(To nie musi być podłączone) |
(4)Oznaczenie statusu
PWR: Wskaźnik zasilania. Zielony wskaźnik świeci, gdy jest podawane zasilanie.
ALM: Wskaźnik awarii. Gdy wystąpi awaria, wskaźnik migocze w cyklu co 5 sekund; gdy awaria została usunięta przez użytkownika, czerwona dioda LED jest zawsze wyłączona. Czerwona dioda LED migocze z częstotliwością 2Hz, gdzie dioda jest włączona przez 200ms i wyłączona przez 300ms. Liczba migotnięć czerwonej diody LED w ciągu 5 sekund reprezentuje różne informacje o awarii, a konkretne zależności są przedstawione w poniższej tabeli:
Numer seryjny |
Liczba migotnięć |
Opis awarii |
1 |
1 |
Awaria przekroczenia prądu |
2 |
2 |
Błąd tolerancji pozycyjnej |
3 |
3 |
Błąd enkodera |
4 |
4 |
Przeładowanie silnika |
5 |
5 |
Nadciśnienie w szynie |
6 |
6 |
Underciśnienie w szynie |
6.Ustawienie przełącznika DIP
7.Filtrowanie polecenia wejściowego
Gdy przełącznik DIP S1 jest ustawiony na ON, funkcja filtru wejściowego jest włączona, a czas filtracji jest konfigurowany za pomocą rejestru 2603; ta funkcja działa tylko wtedy, gdy silnik jest odblokowany;
Sterownik JSV57 używa sześciopozycyjnego przełącznika DIP do ustawienia dokładności podziału i kierunku obrotu silnika.
(1)Ustawienie kierunku
Kierunek |
S2 |
PPOZ |
Zwolnione |
CW |
NA |
(2)Ustawienie mikrokroku
Wynik badania |
S3 |
S4 |
S5 |
S6 |
Domyślny |
NA |
NA |
NA |
NA |
400 |
NA |
NA |
NA |
NA |
800 |
Zwolnione |
NA |
NA |
NA |
1600 |
NA |
Zwolnione |
NA |
NA |
3200 |
Zwolnione |
Zwolnione |
NA |
NA |
6400 |
NA |
NA |
Zwolnione |
NA |
12800 |
Zwolnione |
NA |
Zwolnione |
NA |
25600 |
NA |
Zwolnione |
Zwolnione |
NA |
51200 |
Zwolnione |
Zwolnione |
Zwolnione |
NA |
1000 |
NA |
NA |
NA |
Zwolnione |
2000 |
Zwolnione |
NA |
NA |
Zwolnione |
4000 |
NA |
Zwolnione |
NA |
Zwolnione |
5000 |
Zwolnione |
Zwolnione |
NA |
Zwolnione |
8000 |
NA |
NA |
Zwolnione |
Zwolnione |
10000 |
Zwolnione |
NA |
Zwolnione |
Zwolnione |
20000 |
NA |
Zwolnione |
Zwolnione |
Zwolnione |
40000 |
Zwolnione |
Zwolnione |
Zwolnione |
Zwolnione |
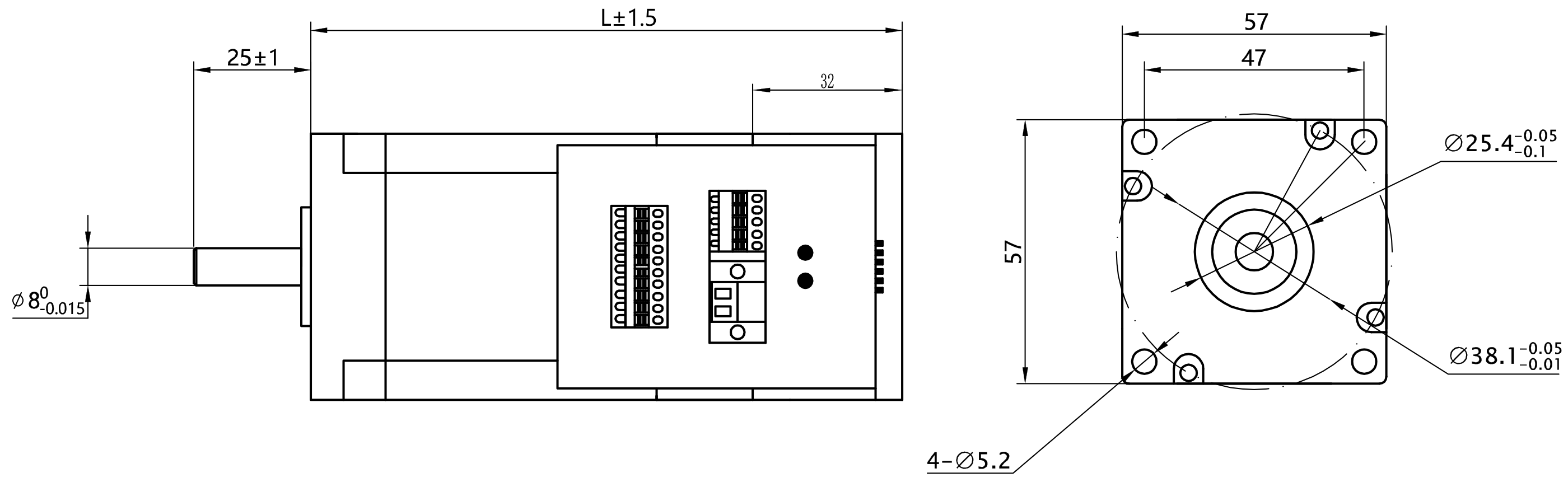
8.Wymiary silnika (jednostka=mm)
Copyright © Changzhou Jinsanshi Mechatronics Co., Ltd. All rights reserved. - Polityka prywatności



