

Página inicial > Produtos > Sistema de servo > Servomotores DC integrados

O motor servo integrado JSV57 é um motor de corrente contínua sem escova com tamanho de moldura de 57mm, integrado com um codificador de 16 bits e um drive de servo. Este motor servo DC utiliza um chip ARM de 32 bits e tecnologia de algoritmo de controle otimizado, com design excelente e tamanho compacto. O design integrado de driver e motor não apenas elimina a necessidade de conexão entre o driver e o motor, mas também reduz eficazmente a interferência eletromagnética entre as conexões. Ele adota uma tecnologia avançada de anti-vibração e baixa geração de calor, resolvendo eficazmente os problemas de aquecimento e ruído.
1. Características
2. Aplicação típica
Adequado para diversos tipos de equipamentos e instrumentos de automação pequenos e médios, como impressoras jato de tinta, máquinas de gravação pequenas e médias, equipamentos de processamento eletrônico, equipamentos automáticos de agarre, tornos CNC especiais, equipamentos de embalagem, etc. É particularmente eficaz em equipamentos onde os usuários esperam baixo ruído e alta velocidade.
3.Indicadores elétricos
Parâmetros |
JSV57 |
|||
Min |
Valor típico |
Max |
Unidade |
|
Corrente de saída contínua |
0 |
- |
6 |
A |
Tensão da fonte de alimentação de entrada |
24 |
36 |
48 |
Vdc |
Corrente de entrada lógica |
7 |
10 |
16 |
mãe! |
Tensão de entrada lógica |
5 |
5 |
24 |
V |
Frequência de pulso |
0 |
- |
200 |
kHz |
Resistência ao isolamento |
100 |
|
|
MΩ |
4.Especificação Elétrica
Unidade |
JSV57-09V36 |
JSV57-14V36 |
JSV57-18V36 |
|
Fases |
|
3 |
||
Poloneses |
|
8 |
||
Voltagem |
|
36vdc |
||
Potência nominal |
W |
90 |
140 |
180 |
Torque nominal |
N.M |
0.28 |
0.45 |
0.57 |
Torque máximo |
N.M |
0.8 |
1.1 |
1.5 |
Velocidade nominal |
rpm |
3000 |
3000 |
3000 |
Corrente nominal |
A |
3.3 |
5 |
6.6 |
5.Introdução à interface e cabeamento do drive
(1)Porta de entrada de energia
Número do terminal |
Símbolo |
Nome |
Ilustrar |
1 |
+Vdc |
Terminal positivo de potência de CC |
DC+24V~48V |
2 |
GND |
Terra de alimentação de corrente contínua |
0V |
(2) Portão de sinal de controlo
Número do terminal |
Símbolo |
Nome |
Ilustrar |
1 |
PUL + |
Entrada de pulso + |
Compatível com sinais de 5V~24V |
2 |
PUL - |
Entrada de pulso - |
|
3 |
DIR + |
Entrada de direção + |
|
4 |
DIR - |
Entrada de direção - |
|
5 |
ENA + |
Habilitar entrada + |
|
6 |
ENA - |
Habilitar entrada - |
|
7 |
PED + |
Saída de sinal de posição + |
|
8 |
PED - |
Saída de sinal de posição - |
|
9 |
ALM + |
Saída de sinal de alarme + |
|
10 |
ALM - |
Saída de sinal de alarme - |
(3) Porta de comunicação RS232
Número do terminal |
Símbolo |
Nome |
Ilustrar |
1 |
NC |
|
|
2 |
RX |
Receptor RS232 |
|
3 |
GND |
Terra de potência |
|
4 |
TX |
Transmissor RS232 |
|
5 |
+5V |
Terminal de alimentação positiva |
(Isso não precisa estar conectado) |
(4)Indicação do estado
PWR: Indicador de energia. O indicador verde acende quando a energia é aplicada.
ALM: Indicador de falha. Quando ocorre uma falha, o indicador pisca em um ciclo de 5 segundos; quando a falha é corrigida pelo usuário, o LED vermelho está sempre desligado. O LED vermelho pisca com uma frequência de 2Hz, onde o LED fica ligado por 200ms e desligado por 300ms. O número de vezes que o LED vermelho pisca em 5 segundos representa informações de falha diferentes, e a relação específica é mostrada na tabela abaixo:
Número de série |
Número de piscadas |
Descrição da Falha |
1 |
1 |
Falha de supercorrente |
2 |
2 |
Alarme de erro de posição tolerável |
3 |
3 |
Falha no codificador |
4 |
4 |
Sobrecarga do motor |
5 |
5 |
Sobretensão no barramento |
6 |
6 |
Subtensão no barramento |
6.Configuração do interruptor DIP
7.Filtragem de comando de entrada
Quando o interruptor DIP S1 é definido como LIGADO, a função de filtro de entrada é ativada e o tempo de filtro é configurado pelo registro 2603; esta função é eficaz apenas quando o motor está desbloqueado;
O driver JSV57 utiliza um interruptor DIP de seis posições para definir a precisão de subdivisão e a direção de rotação do motor.
(1)Configuração de direção
Direção |
S2 |
CCW |
Desligado |
CW |
Em |
(2)Configuração de microdegraus
Pulso/REV |
S3 |
S4 |
S5 |
S6 |
Padrão |
Em |
Em |
Em |
Em |
400 |
Em |
Em |
Em |
Em |
800 |
Desligado |
Em |
Em |
Em |
1600 |
Em |
Desligado |
Em |
Em |
3200 |
Desligado |
Desligado |
Em |
Em |
6400 |
Em |
Em |
Desligado |
Em |
12800 |
Desligado |
Em |
Desligado |
Em |
25600 |
Em |
Desligado |
Desligado |
Em |
51200 |
Desligado |
Desligado |
Desligado |
Em |
1000 |
Em |
Em |
Em |
Desligado |
2000 |
Desligado |
Em |
Em |
Desligado |
4000 |
Em |
Desligado |
Em |
Desligado |
5000 |
Desligado |
Desligado |
Em |
Desligado |
8000 |
Em |
Em |
Desligado |
Desligado |
10000 |
Desligado |
Em |
Desligado |
Desligado |
20000 |
Em |
Desligado |
Desligado |
Desligado |
40000 |
Desligado |
Desligado |
Desligado |
Desligado |
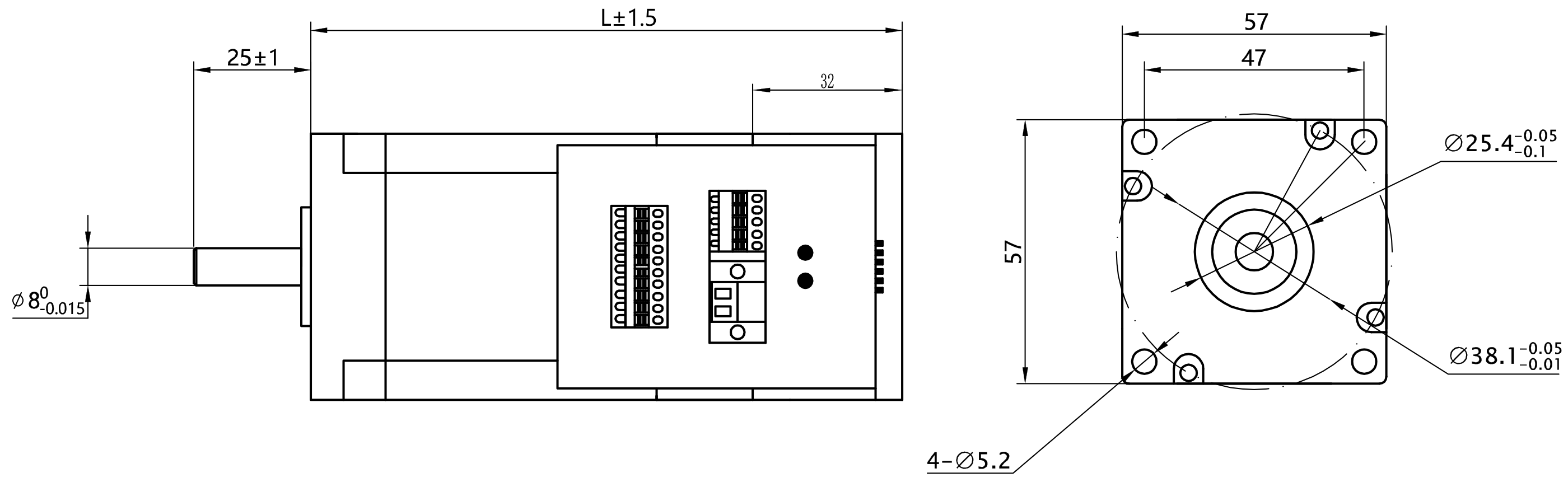
8.Dimensões do motor(unidade=mm)
Copyright © Changzhou Jinsanshi Mechatronics Co., Ltd. All rights reserved. - Política de Privacidade



