

Pagina principală > Produse > Sistem de servo > Servo-motori DC integrați

Motorul servo integrat JSV57 este un motor DC fără burte cu dimensiune de cadru de 57mm, integrat cu un encoder de 16 biți și o unitate de control servo. Acest motor servo DC adoptă un chip ARM de 32 de biți și tehnologie de algoritm de control optimizat, cu un design excelent și dimensiuni compacte. Designul integrat al unității de control și motorului nu numai că economisește conexiunile dintre unitatea de control și motor, dar reduce și efectiv interferențele electromagnetice între conexiuni. Se folosește o tehnologie îmbunătățită de rezistență la vibrații și generare mică de căldură, rezolvând eficient problemele de căldură și zgomot.
1. Caracteristici
2. Aplicație tipică
Adequat pentru diverse dispozitive și instrumente automate mici și mijlocii, cum ar fi imprimantele jet de ink, mașinile de sculptare mici și mijlocii, echipamentele de prelucrare electronică, dispozitivele automate de prindere, centralele CNC speciale, echipamentele de ambalare etc. Este în special eficientă în dispozitivele în care utilizatorii se așteaptă să fie redus zgomotul și să se atingă viteză ridicată.
3.Indicatorii electrici
Parametrii |
JSV57 |
|||
Min |
Valoare tipică |
Max |
Unitate |
|
Courant de ieșire continuu |
0 |
- |
6 |
A |
Tensiunea sursă de alimentare la intrare |
24 |
36 |
48 |
VDC |
Curent de intrare logică |
7 |
10 |
16 |
- Nu! |
Tensiunea la intrarea logică |
5 |
5 |
24 |
V |
Frecvența pulsului |
0 |
- |
200 |
kHz |
Rezistența la izolație |
100 |
|
|
MΩ |
4.Specificații Electrice
Unitate |
JSV57-09V36 |
JSV57-14V36 |
JSV57-18V36 |
|
Faze |
|
3 |
||
Polonii |
|
8 |
||
Tensiune |
|
36VDC |
||
Putere nominală |
W |
90 |
140 |
180 |
Cuplu nominal |
N.M |
0.28 |
0.45 |
0.57 |
Cuplu maxim |
N.M |
0.8 |
1.1 |
1.5 |
Viteza nominală |
rpm |
3000 |
3000 |
3000 |
Curentul Rated |
A |
3.3 |
5 |
6.6 |
5.Interfață de comandă și introducere a cablajului
(1)Port de intrare pentru alimentare
Numărul terminalului |
Simbol |
Nume |
Ilustrează |
1 |
+Vdc |
Terminal pozitiv de alimentare cu curent continuu |
DC+24V~48V |
2 |
GND |
Pământul cu alimentare cu curent continuu |
0V |
(2) Portul de semnal de control
Numărul terminalului |
Simbol |
Nume |
Ilustrează |
1 |
PUL + |
Intrare puls + |
Compatibil cu semnalele de 5V~24V |
2 |
PUL - |
Intrare puls - |
|
3 |
DIR + |
Introducere direcție + |
|
4 |
DIR - |
Introducere direcție - |
|
5 |
ENA + |
Activați intrarea + |
|
6 |
ENA - |
Activați intrarea - |
|
7 |
PED + |
Ieșire semnal de poziție + |
|
8 |
PED - |
Ieșire semnal de poziție - |
|
9 |
ALM + |
Ieșire semnal de alarmă + |
|
10 |
ALM - |
Ieșire semnal de alarmă - |
(3) Portul de comunicație RS232
Numărul terminalului |
Simbol |
Nume |
Ilustrează |
1 |
NC |
|
|
2 |
RX |
Receptor RS232 |
|
3 |
GND |
Pământul de putere |
|
4 |
TX |
Transmițător RS232 |
|
5 |
+5V |
Terminal de alimentare pozitivă |
(Aceasta nu trebuie conectată) |
(4) Indicarea statutului
PWR: Indicator de putere. Indicatorul verde se aprinde când este aplicată tensiunea.
ALM: Indicator de defect. Când apare un defect, indicatorul clintește într-un ciclu de 5 secunde; când defectul este eliminat de utilizator, LED-ul roșu este mereu stins. LED-ul roșu clintește la o frecvență de 2Hz, unde LED-ul este aprins pentru 200ms și stins pentru 300ms. Numărul de clipe ale LED-ului roșu în 5 secunde reprezintă informații diferite despre defecte, iar relația specifică este prezentată în următoarea tabelă:
Numărul de serie |
Număr de clipe |
Descrierea defectului |
1 |
1 |
Defect de supra-curent |
2 |
2 |
Eroare de poziționare cu toleranță alarmă |
3 |
3 |
Defect encoder |
4 |
4 |
Supraîncărcare motor |
5 |
5 |
Supratensiune pe linie |
6 |
6 |
Subtensiune pe linie |
6.Setarea comutatorului DIP
7.Filtrare comandă de intrare
Când interruptorul DIP S1 este setat pe ON, funcția de filtrare a intrării este activată, iar timpul de filtrare este configurat prin înregistrarea 2603; această funcție este eficientă doar când motorul nu este blocat;
Motorul JSV57 utilizează un interruptor DIP cu șase poziții pentru a seta precizia subdiviziunii și direcția rotației motorului.
(1)Setare direcție
Direcţia |
S2 |
CSA |
Închisă |
CW |
On |
(2)Setare Micropas
Puls/REV |
S3 |
S4 |
S5 |
S6 |
Implicit |
On |
On |
On |
On |
400 |
On |
On |
On |
On |
800 |
Închisă |
On |
On |
On |
1600 |
On |
Închisă |
On |
On |
3200 |
Închisă |
Închisă |
On |
On |
6400 |
On |
On |
Închisă |
On |
12800 |
Închisă |
On |
Închisă |
On |
25600 |
On |
Închisă |
Închisă |
On |
51200 |
Închisă |
Închisă |
Închisă |
On |
1000 |
On |
On |
On |
Închisă |
2000 |
Închisă |
On |
On |
Închisă |
4000 |
On |
Închisă |
On |
Închisă |
5000 |
Închisă |
Închisă |
On |
Închisă |
8000 |
On |
On |
Închisă |
Închisă |
10000 |
Închisă |
On |
Închisă |
Închisă |
20000 |
On |
Închisă |
Închisă |
Închisă |
40000 |
Închisă |
Închisă |
Închisă |
Închisă |
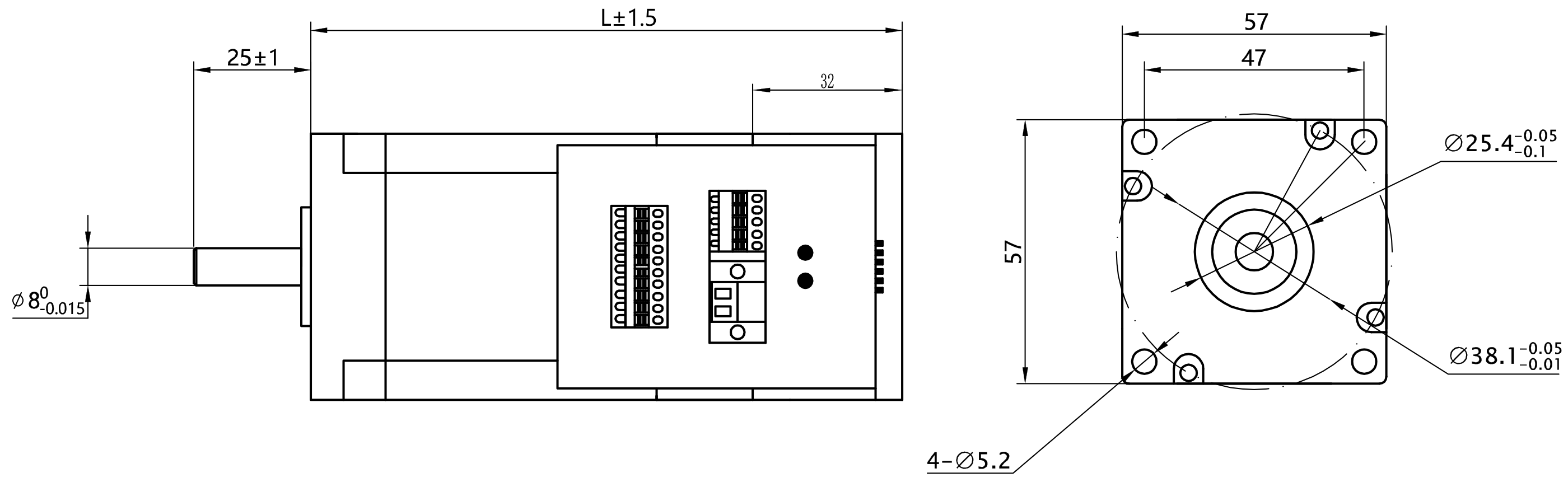
8.Dimensiunile motorului (unitate=mm)
Copyright © Changzhou Jinsanshi Mechatronics Co., Ltd. All rights reserved. - Politica de Confidențialitate



