

Pahinang Pangunang > Mga Produkto > Ang mga steppers ng sarado na loop Motors & Drivers > Ang closed loop stepper driver

Ang aming 3HSS2260 ay isang hybrid high power stepper servo drive. Ito ay umaangkop sa NEMA 34 at NEMA 42 na three-phase stepper motor. Kung ikukumpara sa tradisyunal na open-loop stepper driver, ang stepper servo driver na ito ay maaaring ganap na maiwasan ang stepper motor lost step problem, ang high speed torque na pagbaba ay lubhang mas mababa kaysa sa open-loop stepper driver, lubos na mapahusay ang performance at torque ng high speed motor. . Ang kasalukuyang driver ay maaaring awtomatikong kontrolin batay sa pagkarga, ito ay epektibong pigilan ang pagtaas ng temperatura ng motor, pahabain ang buhay ng pagtatrabaho ng motor. Build-in na posisyon at alarm signal output ay maginhawa para sa host computer upang masubaybayan at kontrolin ang motor tumatakbo estado. Ang pag-andar ng over position error alarma ay tinitiyak na ang kagamitan ay gumagana nang ligtas. Ito ang perpektong kapalit at pag-upgrade ng tradisyunal na open loop driver, at ito rin ay may bahaging function ng AC servo system, ang presyo ay kalahati lamang ng AC system.
1.Mga katangian
● 32-bit DSP at vector closed-loop control technology
● Nang hindi nawawala ang hakbang, mataas na katumpakan sa posisyon
● Pagbutihin ang motor output torque at bilis ng pagtatrabaho
● Variable kasalukuyang control teknolohiya, pigilan ang pagtaas ng temperatura ng motor
● Nakahahangad sa iba't ibang kondisyon ng mekanikal na pasanin (kasama ang mga pulley na may mababang katigasan), walang
kailangang ayusin ang gain parameter
● Makinis at maaasahang gumagalaw, mababang vibration, mahusay na pagpapabuti sa accelerate at decelerate
● Ang kakayahan ng zero speed static na walang vibration
● Mag-adjust sa 3-phase na NEMA34 at NEMA 42 hybrid servo motor
● Maximum step-pulse frequency 200KHZ
● Micro step 400-60000 pulso/rev
● Ang hanay ng boltahe AC150-240V
● Over current, over voltage at over position na proteksyon
● Anim na digital na display ng tubo, madaling i-set ang mga parameter at subaybayan ang estado ng pagmamaneho ng motor
2.Parameter ng Elektrisidad
Boltahe ng Input | AC150~240V (karaniwan ay gumagamit ng 220VAC) |
kasalukuyang output | Peak 6.0A(kasalukuyang variable batay sa load) |
Logic Kasalukuyang Input | 7~20mA |
Dalas | 0~200KHz |
Angkop na motor | 3-phase nema 34 at nema 42 hybrid servo motor |
Resolusyon ng Encoder | 1000 |
Pagtitiis ng Insulation | ≥500MΩ |
3.Parameter ng Kapaligiran
Paraan ng paglamig | Natural na paglamig o pinilit na paglamig ng hangin |
kapaligiran sa pagtatrabaho | Iwasan ang alikabok, oil fog at mga kinakaing gas |
Temperatura ng trabaho | 0~50℃ |
Halumigmig | 40~90%RH |
Paglalaho | 5.9m/s2Max |
Storage temperature | -20℃~65℃ |
3.Power Interface Ports1
Daungan | Simbolo | Definisyon | Puna |
1 | L | Motor power Connector sa 220AC |
|
2 | N |
| |
3 | NC | Hindi Konektado |
|
4 | BR | Resistor ng pagpepreno | Ang panlabas na resistor ng brake na konektado sa pagitan ng Br at P+ |
5 | P+ | DC Bus Voltage |
4.Power Interface Ports2
Daungan | Simbolo | Definisyon | NEMA34 | NEMA42 |
1 | U | Motor Connection Port U | pula | Itim |
2 | V | Port ng Koneksyon ng Motor V | Itim | Kayumanggi |
3 | W | Port ng Koneksyon ng Motor W | asul | asul |
4 | PE | lupa | Dilaw | Dilaw |
5 | L | Power ng controller Kumonekta sa 220VAC | Saklaw ng AC150-220V | |
6 | N | |||
5.Control Signal Interface Ports
Daungan | Simbolo | Definisyon | Puna |
3 | PUL+ | Pulse Signal Input + |
|
4 | PUL- | Pulse Signal Input - | |
5 | DIR+ | Direction Signal Input + | |
6 | DIR- | Input ng Signal ng Direksyon - | |
7 | ALM+ | Output ng Alarm Signal + |
|
8 | ALM- | Output ng Alarm Signal - | |
9 | PEND+ | Position Signal Output + |
|
10 | PEND- | Output ng Signal ng Posisyon - | |
11 | ENA+ | Paganahin ang Signal Input + |
|
12 | ENA- | Paganahin ang Signal Input - | |
23 | OA+ | Encoder A Output | Encoder A,B,Z Signal differential drive(26LS31) output, hindi nakahiwalay na output. Kung ang motor lang may A,B dalawa channel encoder, pagkatapos ay huwag pansinin ang Z channel. |
24 | OA- | ||
25 | OB+ | Encoder B Output | |
26 | OB- | ||
27 | OZ+ | Encoder Z Output | |
28 | OZ- | ||
29 | CZ | Encoder Z open collector output |
|
30 | GND | lupa |
|
6.Encoder Signal Input Interface Ports
Daungan | Simbolo | Definisyon | Puna |
1 | EA+ | Encoder A+ Input | Kung ang motor ay may A,B lamang na dalawang channel encoder, huwag pansinin ang Z channel. |
11 | EA- | Encoder A- Input | |
2 | EB+ | Encoder B+ Input | |
12 | EB- | Encoder B- Input | |
7 | EZ+ | Encoder Z+ Input | |
8 | EZ- | Encoder Z- Input | |
13 | VCC | +5V |
|
3 | GND | lupa |
7.RS232 Communication Interface Ports
Daungan | Simbolo | Definisyon |
1 | NC | Hindi Konektado |
2 | +5V | Para sa Panlabas na HISU |
3 | TXD | RS232 Transmission Port |
4 | GND | lupa |
5 | RXD | RS232 Receiving Port |
6 | NC | Hindi Konektado |
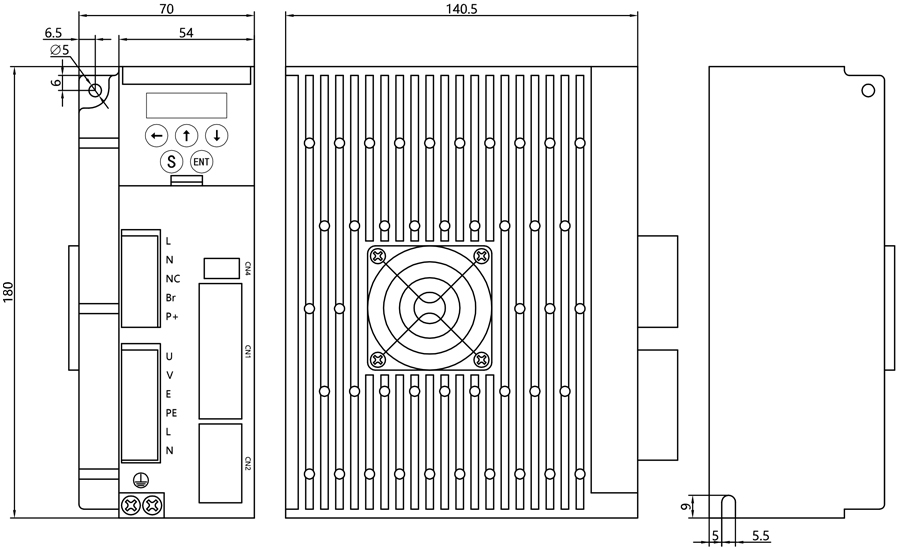
8. Pangkalahatang Mga Dimensyon(unit=mm)
Copyright © Changzhou Jinsanshi Mechatronics Co., Ltd. All rights reserved. - Privacy Policy



