

Pahinang Pangunahin > Mga Produkto > Servo System > Ang mga servo motors ng DC na may integrasyon

Ang JSV57 integrated servo motor ay isang brushless DC motor na may sukat ng frame na 57mm, na-integrate sa isang 16-bit encoder at servo drive. Ang DC servo motor na ito ay gumagamit ng 32-bit ARM chip at optimized control algorithm technology, may mahusay na disenyo at kompaktna laki. Ang integradong disenyo ng driver at motor hindi lamang natatanggal ang mga koneksyon sa pagitan ng driver at motor, kundi pati rin ay epektibong pinapababa ang elektromagnetikong interferensya sa pagitan ng mga koneksyon. Gumagamit ito ng mas magandang anti-vibration at mababang pag-aaraw-araw na teknolohiya, epektibong nasasagot ang mga problema ng pag-aaraw-araw at tunog.
1.Mga katangian
2.Karaniwang Aplikasyon
Sugoid para sa iba't ibang kalakihan ng automatikong kagamitan at instrumento, tulad ng printer na inkjet, kalakihan ng katamtaman o maliit na machine para sa pagpuputol, elektronikong kagamitan ng proseso, awtomatikong kagamitan para sa paghawak, espesyal na CNC machine tools, packaging equipment, atbp. Lalo itong epektibo sa mga kagamitan kung saan inaasahan ng mga gumagamit ang mababang tunog at mataas na bilis.
3.Mga tagapagpahiwatig ng kuryente
Mga Parameter |
JSV57 |
|||
Min |
Karaniwang halaga |
Max |
Yunit |
|
Kasarian ng output na kuryente |
0 |
- |
6 |
A |
Voltage ng input power supply |
24 |
36 |
48 |
VDC |
Logic input na kasalukuyang |
7 |
10 |
16 |
ina |
Voltage ng logic input |
5 |
5 |
24 |
V |
Mga pulso ng pulso |
0 |
- |
200 |
kHz |
Pagtitiis ng Insulation |
100 |
|
|
MΩ |
4.Elektrikal na Espekisipon
Yunit |
JSV57-09V36 |
JSV57-14V36 |
JSV57-18V36 |
|
Mga Phase |
|
3 |
||
Mga poste |
|
8 |
||
Boltahe |
|
36VDC |
||
Tayahering Karagdagang Gana |
W |
90 |
140 |
180 |
Nakatakdang torque |
N.m |
0.28 |
0.45 |
0.57 |
Pinakamataas na torque |
N.m |
0.8 |
1.1 |
1.5 |
Naka-rate na Bilis |
rpm |
3000 |
3000 |
3000 |
Naka-rate na Kasalukuyan |
A |
3.3 |
5 |
6.6 |
5. Pagkilala sa Interface ng Drive at Paggawa ng Koneksyon
(1)Power input port
Numero ng terminal |
Simbolo |
Pangalan |
Magbigay ng halimbawa |
1 |
+Vdc |
DC power positive terminal |
DC+24V~48V |
2 |
GND |
DC power ground |
0V |
(2)Ang port ng signal ng kontrol
Numero ng terminal |
Simbolo |
Pangalan |
Magbigay ng halimbawa |
1 |
PUL + |
Pulse input + |
Kumakatawan sa mga senyal na 5V~24V |
2 |
PUL - |
Pulse input - |
|
3 |
DIR + |
Input ng direksyon + |
|
4 |
DIR - |
Input ng direksyon - |
|
5 |
ENA + |
Paganahin ang input + |
|
6 |
ENA - |
Paganahin ang input - |
|
7 |
PED + |
Position Signal Output + |
|
8 |
PED - |
Output ng Signal ng Posisyon - |
|
9 |
ALM + |
Output ng Alarm Signal + |
|
10 |
ALM - |
Output ng Alarm Signal - |
(3) RS232 port ng komunikasyon
Numero ng terminal |
Simbolo |
Pangalan |
Magbigay ng halimbawa |
1 |
NC |
|
|
2 |
RX |
RS232 tumatanggap |
|
3 |
GND |
Power ground |
|
4 |
TX |
Nagpadala ng RS232 |
|
5 |
+5V |
Positibong terminal ng kuryente |
(Ito ay hindi kailangang magkaroon ng koneksyon) |
(4)Pinapahiwatig ang katayuan
PWR: Indikador ng Kuryente. Ang berdeng indikador ay umiilaw kapag may aplikadong kuryente.
ALM: Indikador ng Kabig. Kapag nagaganap ang isang kabig, umiilaw ang indikador sa isang 5 segundo siklo; kapag natatanggal na ang kabig ng gumagamit, laging patay ang pula na LED. Umiliwang ang pula na LED sa isang frekwentse ng 2Hz, kung saan ay bukas para sa 200ms at patay para sa 300ms. Ang bilang ng pag-iliwang ng pula na LED sa loob ng 5 segundo ay kinakatawan ang iba't ibang impormasyon ng kabig, at ang tiyak na relasyon ay ipinapakita sa sumusunod na talahanayan:
Serial number |
Bilang ng pag-iliwang |
Paglalarawan ng Kabig |
1 |
1 |
Kabig ng sobrang-buhos |
2 |
2 |
Alarm para sa pagkakamali ng posisyon |
3 |
3 |
Kamalian sa Encoder |
4 |
4 |
Sobrang loheng motor |
5 |
5 |
Bus sobrang voltiyaj |
6 |
6 |
Bus kulang sa voltiyaj |
6.Pag-set ng switch ng DIP
7.Pagpapalibot ng utos ng input
Kapag ang DIP switch S1 ay itinakda sa ON, pinagana ang kakayahan ng pagpapalibot ng input, at itinataya ang oras ng pagpapalibot sa pamamagitan ng register 2603; ang kakayanang ito ay epektibo lamang kapag ang motor ay hindi nilulock;
Gumagamit ang JSV57 driver ng isang anim-na posisyon na DIP switch upang itakda ang subdivisyon na katumpakan at direksyon ng pag-ikot ng motor.
(1)Pagtatakda ng Direksyon
Direksyon |
S2 |
CCW |
I-OFF |
CW |
Sa |
(2)Paggawa ng Microstep
Pulso/REV |
S3 |
S4 |
S5 |
S6 |
Di-tinukoy |
Sa |
Sa |
Sa |
Sa |
400 |
Sa |
Sa |
Sa |
Sa |
800 |
I-OFF |
Sa |
Sa |
Sa |
1600 |
Sa |
I-OFF |
Sa |
Sa |
3200 |
I-OFF |
I-OFF |
Sa |
Sa |
6400 |
Sa |
Sa |
I-OFF |
Sa |
12800 |
I-OFF |
Sa |
I-OFF |
Sa |
25600 |
Sa |
I-OFF |
I-OFF |
Sa |
51200 |
I-OFF |
I-OFF |
I-OFF |
Sa |
1000 |
Sa |
Sa |
Sa |
I-OFF |
2000 |
I-OFF |
Sa |
Sa |
I-OFF |
4000 |
Sa |
I-OFF |
Sa |
I-OFF |
5000 |
I-OFF |
I-OFF |
Sa |
I-OFF |
8000 |
Sa |
Sa |
I-OFF |
I-OFF |
10000 |
I-OFF |
Sa |
I-OFF |
I-OFF |
20000 |
Sa |
I-OFF |
I-OFF |
I-OFF |
40000 |
I-OFF |
I-OFF |
I-OFF |
I-OFF |
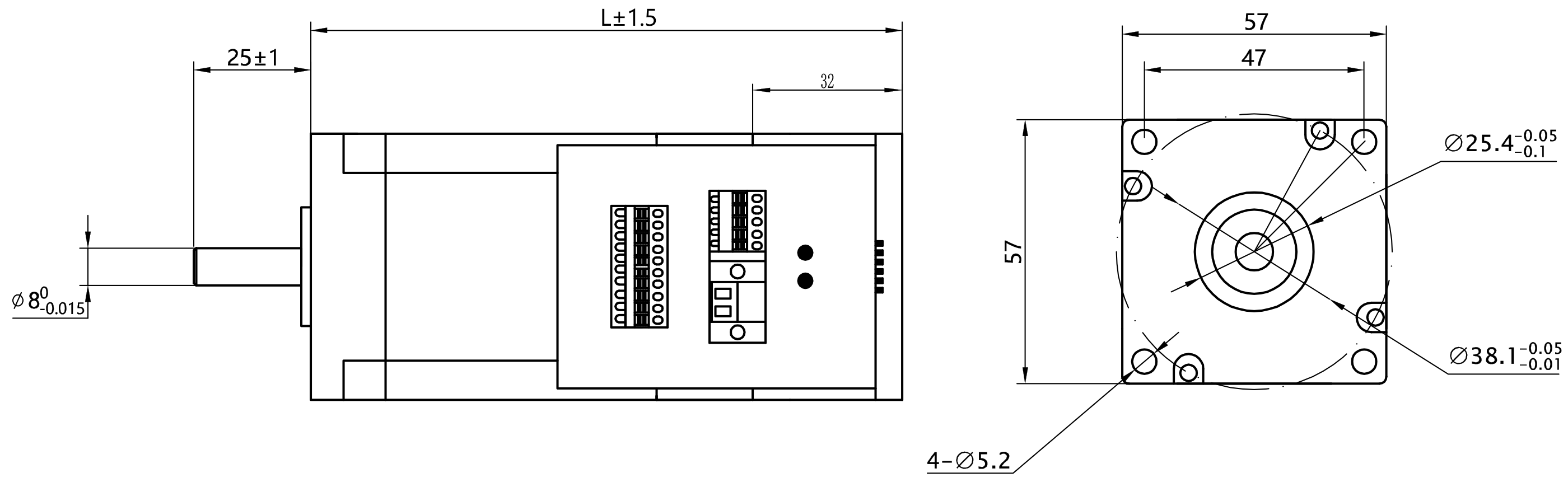
8.Dimensyon ng Motor (unit=mm)
Copyright © Changzhou Jinsanshi Mechatronics Co., Ltd. All rights reserved. - Patakaran sa Privasi



