

Página de inicio > PRODUCTOS > Sistema de servicio > Servo motores de corriente continua integrados

El motor de servo integrado JSV57 es un motor de corriente continua sin escobillas de tamaño de marco de 57 mm, integrado con un codificador de 16 bits y un controlador de servo. Este motor de servo DC utiliza un chip ARM de 32 bits y tecnología de algoritmo de control optimizado, con un diseño excelente y tamaño compacto. El diseño integrado del controlador y el motor no solo ahorra la conexión entre el controlador y el motor, sino que también reduce eficazmente la interferencia electromagnética entre las conexiones. Se emplea una mejor tecnología antivibración y baja generación de calor, resolviendo eficazmente los problemas de generación de calor y ruido.
1. Características
2. Aplicación típica
Adecuado para diversos equipos e instrumentos de automatización de tamaño pequeño y mediano, como impresoras de inyección de tinta, máquinas de grabado de tamaño pequeño y mediano, equipos de procesamiento electrónico, equipos automáticos de agarre, máquinas herramienta CNC especiales, equipos de embalaje, etc. Es especialmente eficaz en equipos donde los usuarios esperan bajo ruido y alta velocidad.
3.Indictores eléctricos
Parámetros |
JSV57 |
|||
Mín |
Valor típico |
Máx |
Unidad |
|
Corriente de salida continua |
0 |
- |
6 |
A. El |
Voltaje de la fuente de alimentación de entrada |
24 |
36 |
48 |
Vdc |
Corriente de entrada lógica |
7 |
10 |
16 |
el número de |
Voltaje de entrada lógica |
5 |
5 |
24 |
V |
Frecuencia de pulso |
0 |
- |
200 |
el número de |
Resistencia de aislamiento |
100 |
|
|
MΩ |
4.Especificación Eléctrica
Unidad |
JSV57-09V36 |
JSV57-14V36 |
JSV57-18V36 |
|
Fases |
|
3 |
||
Polos |
|
8 |
||
Voltaje |
|
36vdc |
||
Potencia nominal |
W |
90 |
140 |
180 |
Par nominal |
N.M |
0.28 |
0.45 |
0.57 |
Par motor pico |
N.M |
0.8 |
1.1 |
1.5 |
Velocidad Nominal |
rpm |
3000 |
3000 |
3000 |
Corriente nominal |
A. El |
3.3 |
5 |
6.6 |
5.Interfaz de control y introducción a la conexión
(1)Puerto de entrada de energía
Número de terminal |
El símbolo |
Nombre |
Ilustrar |
1 |
+Vdc |
Terminal positivo de potencia de CC |
Las emisiones de CO2 de los combustibles renovables |
2 |
El GND |
Tierra de energía de corriente continua |
0V |
(2) Puerto de señal de control
Número de terminal |
El símbolo |
Nombre |
Ilustrar |
1 |
PUL + |
Entrada de pulso + |
Compatible con señales de 5V~24V |
2 |
PUL - |
Entrada de pulso - |
|
3 |
DIR + |
Entrada de dirección + |
|
4 |
DIR - |
Entrada de dirección - |
|
5 |
ENA + |
Habilitar entrada + |
|
6 |
ENA - |
Habilitar entrada - |
|
7 |
PED + |
Salida de señal de posición + |
|
8 |
PED - |
Salida de señal de posición - |
|
9 |
ALM + |
Salida de señal de alarma + |
|
10 |
ALM - |
Salida de señal de alarma - |
(3) Puerto de comunicación RS232
Número de terminal |
El símbolo |
Nombre |
Ilustrar |
1 |
NC |
|
|
2 |
RX |
Receptor RS232 |
|
3 |
El GND |
Tierra de potencia |
|
4 |
TX |
Envío RS232 |
|
5 |
+5V |
Terminal de energía positiva |
(Esto no necesita estar conectado) |
(4)Indición del estado
PWR: Indicador de energía. El indicador verde se enciende cuando se aplica la energía.
ALM: Indicador de falla. Cuando ocurre una falla, el indicador parpadea en un ciclo de 5 segundos; cuando la falla es eliminada por el usuario, el LED rojo siempre está apagado. El LED rojo parpadea a una frecuencia de 2Hz, donde el LED está encendido durante 200ms y apagado durante 300ms. El número de veces que el LED rojo parpadea en 5 segundos representa información de falla diferente, y la relación específica se muestra en la siguiente tabla:
Número de serie |
Número de parpadeos |
Descripción de la falla |
1 |
1 |
Falla de sobrecorriente |
2 |
2 |
Alarma de error de posición tolerable |
3 |
3 |
Falla del codificador |
4 |
4 |
Sobrecarga del motor |
5 |
5 |
Sobre-tensión del autobús |
6 |
6 |
Subvoltaje del autobús |
6.Configuración del interruptor DIP
7.Filtrado de comando de entrada
Cuando el interruptor DIP S1 se configura en ON, se habilita la función de filtro de entrada y el tiempo de filtro se configura mediante el registro 2603; esta función es efectiva solo cuando el motor no está bloqueado;
El controlador JSV57 utiliza un interruptor DIP de seis posiciones para configurar la precisión de subdivisión y la dirección de rotación del motor.
(1)Configuración de dirección
Dirección |
S2 |
El punto de partida |
Off |
CW |
On |
(2)Configuración de micro-pasos
Pulso/Rev |
S3 |
S4 |
S5 y S5 |
S6 |
Predeterminado |
On |
On |
On |
On |
400 |
On |
On |
On |
On |
800 |
Off |
On |
On |
On |
1600 |
On |
Off |
On |
On |
3200 |
Off |
Off |
On |
On |
6400 |
On |
On |
Off |
On |
12800 |
Off |
On |
Off |
On |
25600 |
On |
Off |
Off |
On |
51200 |
Off |
Off |
Off |
On |
1000 |
On |
On |
On |
Off |
2000 |
Off |
On |
On |
Off |
4000 |
On |
Off |
On |
Off |
5000 |
Off |
Off |
On |
Off |
8000 |
On |
On |
Off |
Off |
10000 |
Off |
On |
Off |
Off |
20000 |
On |
Off |
Off |
Off |
40000 |
Off |
Off |
Off |
Off |
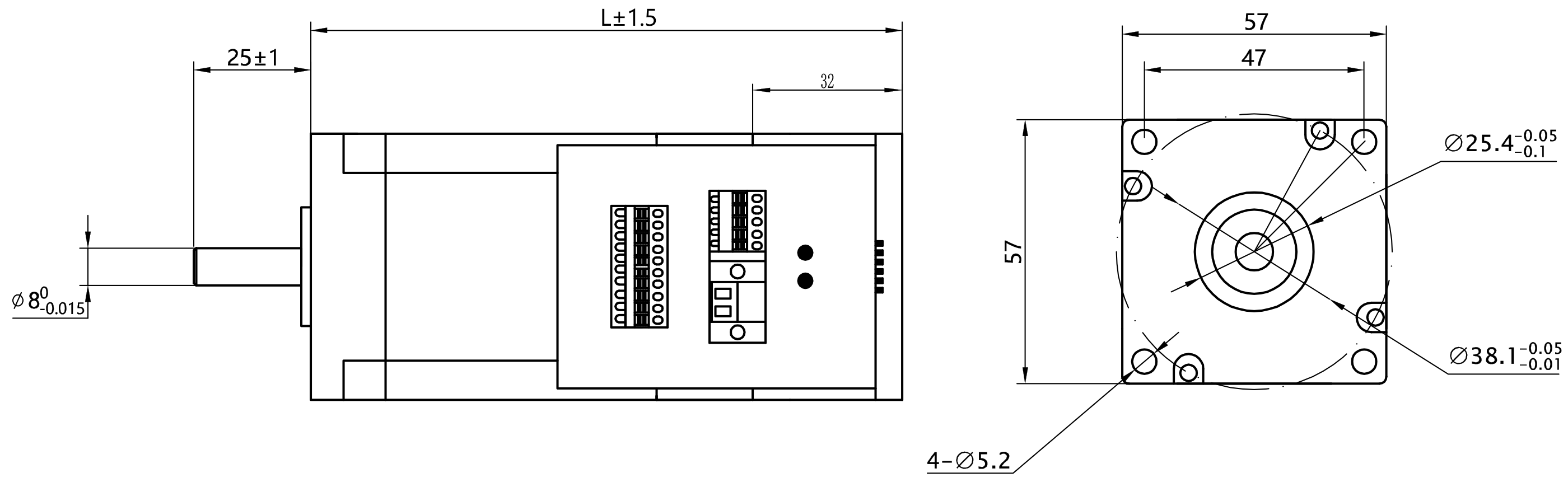
8.Dimensionalidades del motor (unidad=mm)
Copyright © Changzhou Jinsanshi Mechatronics Co., Ltd. All rights reserved. - Política de privacidad



